Within Sky Detectors
How Aircraft Tracking Filters UAP Alerts
Aircraft tracking data helps detectors decide whether a bright moving object is unusual or just poorly recognized traffic.
On this page
- What ADS B can identify
- Where aircraft data is incomplete
- How sky stations combine tracks and video
Page outline Jump by section
Introduction
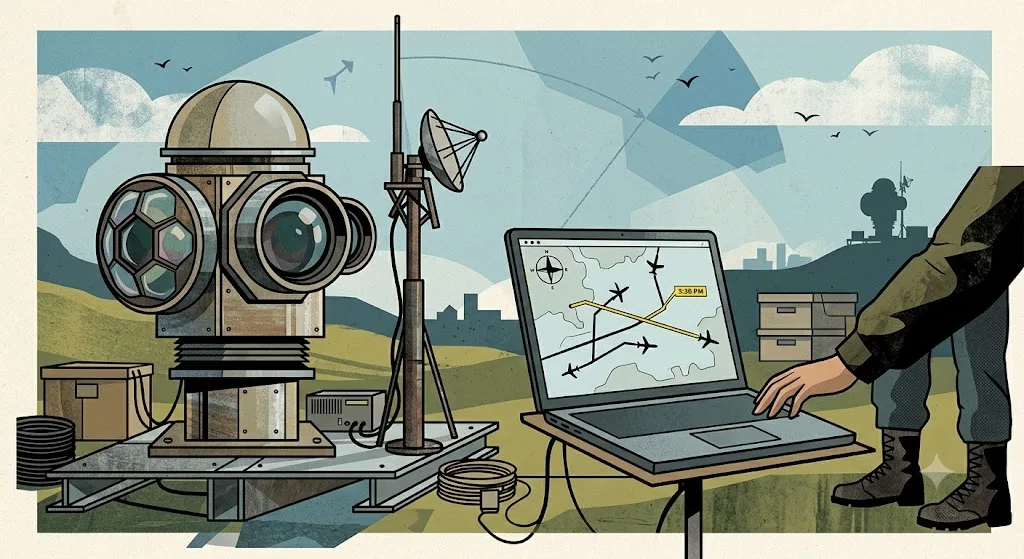
ADS-B receivers are one of the most useful “ordinary-object” filters in automated instrumented UFO detectors. ADS-B, or Automatic Dependent Surveillance–Broadcast, is the radio system by which many aircraft broadcast their identity, position, altitude, speed and other flight data. For a sky station watching for UAP, this matters because a bright moving light is often not anomalous at all: it may be a passenger aircraft, business jet, police helicopter, training aircraft or air ambulance seen at an unfamiliar angle, in haze, near twilight, or through a camera with limited depth cues. [Federal Aviation Administration]faa.govFederal Aviation Administration Automatic Dependent SurveillanceFederal Aviation Administration Automatic Dependent Surveillance
The practical value is not simply “look it up on a flight tracker”. A well-designed detector can receive or query aircraft tracks automatically, time-match them to video frames, project the aircraft’s reported three-dimensional position into the camera image, and decide whether a detection is probably known traffic, probably unrelated traffic, or still worth escalating. This is exactly the kind of contextual metadata NASA’s 2023 UAP study said is usually missing from UAP evidence: calibration, multiple measurements, sensor metadata and baseline data. [NASA Science]science.nasa.govOpen source on nasa.gov.
What ADS-B Can Identify
ADS-B helps automated UAP detectors answer a basic but powerful question: was there a known transmitting aircraft in the same part of the sky at the same time? The answer can remove a large fraction of false alerts before a human ever reviews the video.
The system works because ADS-B “Out” broadcasts aircraft state information from onboard avionics, while ADS-B “In” is the reception and use of those broadcasts by other aircraft or ground receivers. Aviation authorities describe ADS-B as surveillance based on aircraft or airport vehicles broadcasting identity, position and related information derived from onboard systems such as satellite navigation. [EUROCONTROL]eurocontrol.intOpen source on eurocontrol.int.
For a UAP station, that broadcast can be used in several concrete ways:
- Identity check: compare the detected object with nearby aircraft callsigns, ICAO addresses or other identifiers where available.
- Position check: test whether a reported aircraft track crosses the camera’s field of view at the detection time.
- Motion check: compare the object’s apparent direction and speed in video with the aircraft’s reported heading, altitude and ground speed.
- Brightness plausibility: flag known aircraft routes, approaches and departures that often produce bright landing lights, contrails, strobes or infrared signatures.
- Calibration: use known aircraft positions as moving reference targets for camera pointing and performance tests.
The calibration use is especially important. The Galileo Project’s all-sky infrared camera paper describes using ADS-B-equipped aircraft as reference objects to calibrate camera orientation, because long-wave infrared cameras cannot rely on visible stars in the same way that ordinary astronomical cameras can. The project used ADS-B aircraft positions, camera intrinsic calibration and a perspective-solving method to match aircraft world coordinates to image pixels. [MDPI]mdpi.comCommissioning an All-Sky Infrared Camera Array for Detection of Airborne ObjectsCommissioning an All-Sky Infrared Camera Array for Detection of Airborne Objects
That turns ADS-B from a simple “debunking” layer into part of the measurement system itself. A passing airliner is not just a nuisance object; it is a known moving target that can reveal whether the camera is aimed where the software thinks it is aimed, whether time stamps are drifting, and whether the detection model is missing aircraft under certain weather or viewing conditions.

Where Aircraft Data Is Incomplete
ADS-B is powerful, but it is not a complete map of everything in the sky. Treating it as complete would create a different kind of false confidence: an automated detector might label an event “not aircraft” merely because no ADS-B match appears, when the better conclusion is “no ADS-B match was found”.
The first limitation is equipage and airspace. In the United States, ADS-B Out is required in specified controlled airspace under FAA rules, but the regulations still contain defined exceptions and deviation procedures. [eCFR]ecfr.govOpen source on ecfr.gov. In the United Kingdom, the Civil Aviation Authority has encouraged and regulated electronic conspicuity devices, including portable ADS-B-capable devices, but general aviation electronic conspicuity has not historically meant that every aircraft everywhere is transmitting a standard ADS-B position visible to every civilian receiver. [Civil Aviation Authority]caa.co.ukelectronic conspicuity deviceselectronic conspicuity devices
The second limitation is coverage. ADS-B reception depends on line of sight, receiver density, antenna placement, terrain, aircraft altitude and network participation. Commercial flight-tracking services can combine ADS-B with other techniques, such as multilateration, or MLAT, which estimates a position from the arrival time of transponder signals at multiple receivers. Flightradar24 explains that MLAT helps track aircraft that do not have ADS-B transponders, but it also requires suitable receiver geometry and enough receivers hearing the same aircraft. [Flightradar24]flightradar24.comOpen source on flightradar24.com.
The third limitation is data access and filtering. Some public flight-tracking services suppress or delay certain aircraft for privacy, security or legal reasons. ADS-B Exchange has built its reputation around displaying broadcasts as received from an independent receiver network, while other services may honour block lists or rely more heavily on official feeds. That distinction matters for UAP analysis because a detector using a filtered public map may miss traffic that a local receiver or less-filtered source would show. [ADS-B Exchange]adsbexchange.comOpen source on adsbexchange.com.
The fourth limitation is timing. ADS-B is near-real-time, not perfect-real-time, and camera systems have their own timestamp problems. In the Galileo Project’s infrared camera commissioning work, the authors explicitly relaxed time-matching thresholds because of camera timestamp imprecision, ADS-B latency and update intervals. Their paper notes that one cited latency study found a mean delay of about 0.2 seconds between onboard time and ground receiving time, while another reported that 13% of ADS-B updates occurred at intervals greater than two seconds. [MDPI]mdpi.comCommissioning an All-Sky Infrared Camera Array for Detection of Airborne ObjectsCommissioning an All-Sky Infrared Camera Array for Detection of Airborne Objects
For UAP detectors, the operational lesson is clear: ADS-B should be treated as a probabilistic context layer, not a final oracle. A good system records whether aircraft data were available, what source was used, what time tolerance was applied, what receiver coverage existed, and whether the match was strong, weak or absent.
How Sky Stations Combine Tracks and Video
The best implementation does not leave aircraft comparison to a human reviewer staring at a separate map. It brings ADS-B into the detector’s data pipeline.
A practical sky station can work in four stages. First, it records a video or infrared detection with precise time, camera position and camera orientation. Second, it collects local ADS-B messages through a receiver or queries a historical aircraft database. Third, it projects aircraft tracks into the camera’s field of view, using the camera calibration model. Fourth, it scores whether the video object and aircraft track are consistent in time, direction and image position.
The Galileo Project’s infrared system offers a concrete research example. During commissioning, the team used ADS-B records within a 10 km square around the observatory, checked whether aircraft should have been in the effective field of view, checked whether the cameras were recording, and then compared those records with detections from a YOLO machine-learning object detector. This allowed them to separate “in range”, “viewable”, “recorded” and “detected” aircraft rather than treating missed detections as a mystery. [MDPI]mdpi.comCommissioning an All-Sky Infrared Camera Array for Detection of Airborne ObjectsCommissioning an All-Sky Infrared Camera Array for Detection of Airborne Objects
The results show why this matters. Over five months, the system counted 27,467 ADS-B-equipped aircraft within range of the observatory; 8,550 met the location and recording criteria; and 3,678 were matched to at least one object detection. The study reported an overall acceptance of 41% for ADS-B-equipped aircraft and a mean detection efficiency of 36%, with performance strongly affected by range, field of view, camera uptime, precipitation, visibility, humidity, lens condition, dust and raindrops. [MDPI]mdpi.comCommissioning an All-Sky Infrared Camera Array for Detection of Airborne ObjectsCommissioning an All-Sky Infrared Camera Array for Detection of Airborne Objects
That is not a failure of ADS-B. It is evidence of why automated UAP work needs ordinary aircraft as a benchmark dataset. If a detector cannot reliably detect, match and explain known aircraft, its claims about unknown objects will be weak. Aircraft traffic supplies repeatable test cases with known positions, altitudes and trajectories, allowing developers to measure how much of the ordinary sky their system understands before asking it to judge the extraordinary.
Sky360’s public materials point in a similar direction from the citizen-science side: its stated aim is a low-cost, continuous sky-observation platform for planes, satellites, meteors, drones, weather phenomena, birds and UAP. [sky360.org]sky360.orgOpen source on sky360.org. In such a network, ADS-B is not a glamorous sensor, but it is one of the key tools that prevents the platform from drowning in explainable aircraft detections.

The Decision Rules That Make ADS-B Useful
A UAP detector should not use aircraft data as a simple yes-or-no switch. The useful output is a confidence judgement that can be audited later.
A robust aircraft-context layer would normally preserve at least five fields with each event:
- Aircraft-track source: local receiver, public network, historical database, MLAT-derived track, official feed or a combination.
- Coverage status: whether the receiver was operating, whether the relevant sky sector had good reception, and whether network data were available.
- Matching tolerance: the time window, angular separation and range assumptions used to compare the object with aircraft tracks.
- Match result: strong aircraft match, possible aircraft match, nearby but inconsistent aircraft, no known transmitting aircraft, or insufficient aircraft data.
- Escalation reason: why the event remains interesting despite aircraft context, such as inconsistent motion, multi-sensor corroboration, lack of ADS-B coverage, or a non-aircraft signature.
This distinction matters because “no match” is not the same as “not an aircraft”. An aircraft may lack ADS-B, be outside receiver coverage, be suppressed on a public service, be represented by delayed or sparse data, or be seen as a reflection, contrail or light effect away from the aircraft’s apparent projected position. Conversely, “aircraft nearby” is not the same as “case solved”; the projected track still has to fit the camera geometry and timing.
NASA’s UAP study warned that AI and machine learning are only useful when the underlying data are well characterised and collected to strong standards. [NASA Science]science.nasa.govOpen source on nasa.gov. ADS-B helps meet that standard when it is logged transparently, but it can undermine it when it is applied casually. The key is not merely having a flight-tracking overlay; it is preserving enough metadata for another analyst to reproduce the match.
Why ADS-B Changes the UAP Evidence Standard
The presence of ADS-B in an instrumented detector raises the bar for both explanations and anomalies. A video that once might have been presented as “a fast light crossing the sky” can be reclassified as a known aircraft if the track, time and camera angle agree. That is a good outcome: it removes noise from the dataset and gives researchers a better baseline of ordinary aerial traffic.
It also clarifies what a stronger UAP event would need to show. A genuinely interesting instrumented case would not merely lack a public flight-tracker entry. It would need a documented receiver state, checked coverage, relevant airspace context, camera calibration, weather context, and preferably corroboration from other sensors or stations. NASA’s report makes the same broader point: physical constraints on unusual events require rigorous, evidence-based data, not isolated observations lacking metadata. [NASA Science]science.nasa.govOpen source on nasa.gov.
ADS-B therefore plays a modest but decisive role in automated instrumented UFO detectors. It does not identify every aircraft, and it cannot by itself prove that an unmatched object is anomalous. What it can do is make ordinary aircraft harder to mistake for UAP, turn routine traffic into calibration data, and force every unresolved event to carry a clearer statement of what was checked, what was missing, and why the alert still deserves attention.

Amazon book picks
Further Reading
Books and field guides related to How Aircraft Tracking Filters UAP Alerts. Use these as the next step if you want deeper reading beyond the article.

Introduction to Avionics Systems
First published 2011. Subjects: Engineering, Astronautics, Electronics, Avionics.

Fundamentals of air traffic control
First published 1990. Subjects: Air traffic control, Private flying.
Computer Vision
First published 2010. Subjects: Computer algorithms, Bildverarbeitung, Computer vision, Image processing, Maschinelles Sehen.
Understanding GPS/GNSS
First published 2017. Subjects: Global Positioning System, TECHNOLOGY & ENGINEERING, Military Science.
eBay marketplace picks
Marketplace Samples
Live-tested eBay searches with available results related to this page.


Endnotes
-
Source: faa.gov
Title: Federal Aviation Administration Automatic Dependent Surveillance
Link: https://www.faa.gov/about/office_org/headquarters_offices/avs/offices/afx/afs/afs400/afs410/ads-b -
Source: eurocontrol.int
Link: https://www.eurocontrol.int/service/automatic-dependent-surveillance-broadcast -
Source: science.nasa.gov
Link: https://science.nasa.gov/wp-content/uploads/2023/09/uap-independent-study-team-final-report.pdf -
Source: mdpi.com
Title: Commissioning an All-Sky Infrared Camera Array for Detection of Airborne Objects
Link: https://www.mdpi.com/1424-8220/25/3/783 -
Source: ecfr.gov
Link: https://www.ecfr.gov/current/title-14/chapter-I/subchapter-F/part-91/subpart-C/section-91.225 -
Source: faa.gov
Link: https://www.faa.gov/air_traffic/publications/domesticnotices/dom21002_gen.html -
Source: flightradar24.com
Link: https://www.flightradar24.com/how-it-works/mlat -
Source: flightradar24.com
Title: how flightradar24 uses mlat to counter gps jamming
Link: https://www.flightradar24.com/blog/aviation-explainer-series/how-flightradar24-uses-mlat-to-counter-gps-jamming/ -
Source: sky360.org
Link: https://www.sky360.org/ -
Source: sky360.org
Link: https://www.sky360.org/development -
Source: science.nasa.gov
Link: https://science.nasa.gov/uap/ -
Source: flightradar24.com
Title: Automatic Dependent Surveillance
Link: https://www.flightradar24.com/how-it-works/ads-b -
Source: flightradar24.com
Link: https://www.flightradar24.com/how-it-works -
Source: flightradar24.com
Title: how we track flights with ads b
Link: https://www.flightradar24.com/blog/inside-flightradar24/how-we-track-flights-with-ads-b/ -
Source: icao.int
Link: https://www.icao.int/ru/filebrowser/download/75060?fid=75060 -
Source: caa.co.uk
Title: electronic conspicuity devices
Link: https://www.caa.co.uk/general-aviation/aircraft-ownership-and-maintenance/electronic-conspicuity-devices/ -
Source: adsbexchange.com
Link: https://www.adsbexchange.com/ -
Source: skybrary.aero
Title: Automatic Dependent Surveillance
Link: https://skybrary.aero/articles/automatic-dependent-surveillance-broadcast-ads-b -
Source: navi.ion.org
Link: https://navi.ion.org/content/68/2/293 -
Source: Wikipedia
Title: Automatic Dependent Surveillance–Broadcast
Link: https://en.wikipedia.org/wiki/Automatic_Dependent_Surveillance%E2%80%93Broadcast -
Source: Wikipedia
Title: The Galileo Project
Link: https://en.wikipedia.org/wiki/The_Galileo_Project -
Source: globe.adsbexchange.com
Link: https://globe.adsbexchange.com/ -
Source: support.adsbexchange.com
Title: 44653064937741 Map Help
Link: https://support.adsbexchange.com/hc/en-us/articles/44653064937741-Map-Help -
Source: adsbexchange.com
Link: https://www.adsbexchange.com/data-products/ -
Source: infrastructure.gov.au
Link: https://www.infrastructure.gov.au/sites/default/files/documents/adsb-101-anonymous.pdf -
Source: caa.co.uk
Link: https://www.caa.co.uk/publication/download/27011
Additional References
-
Source: youtube.com
Title: Using a Raspberry Pi Zero 2W as a Flightradar24 ADS-B Receiver
Link: https://www.youtube.com/watch?v=-KT8_o5CGEcSource snippet
Track Planes with PiAware FlightAware Pro Stick Plus Set-Up Guide...
-
Source: youtube.com
Link: https://www.youtube.com/watch?v=yV4w4JaevekSource snippet
DIY: Build an ADS-B Receiver and Track the "disappearing" Janet Flights into AREA 51 Dreamland Resort · 21K views...
-
Source: federalregister.gov
Link: https://www.federalregister.gov/documents/2023/10/17/2023-22710/inclusion-of-additional-automatic-dependent-surveillance-broadcast-ads-b-out-technical-standard -
Source: youtube.com
Title: DIY: Build an ADS-B Receiver and Track Flights into Area 51
Link: https://www.youtube.com/watch?v=kyWtIcz8UNASource snippet
Using a Raspberry Pi Zero 2W as a Flightradar24 ADS-B Receiver...
-
Source: researchgate.net
Link: https://www.researchgate.net/publication/391817538_Initial_results_from_the_first_field_expedition_of_UAPx_to_study_unidentified_anomalous_phenomena -
Source: facebook.com
Link: https://www.facebook.com/itvnews/posts/a-nasa-report-into-unidentified-flying-objects-ufos-has-found-no-evidence-that-t/686500760179269/ -
Source: eoportal.org
Link: https://www.eoportal.org/other-space-activities/ads-b -
Source: txtav.com
Link: https://txtav.com/en/journey/articles/articles/adsb-out-explained -
Source: reddit.com
Link: https://www.reddit.com/r/ADSB/comments/18l27c7/adsb_tracking_websites_do_not_show_every_aircraft/ -
Source: instagram.com
Link: https://www.instagram.com/p/DV02iWijCHk/
Topic Tree