Within Edge Computer
Can a detector react before the object is gone?
Local computing lets a station move from wide detection to focused tracking while a short-lived sky event is still visible.
On this page
- Why remote review is too slow
- How wide and narrow sensors share a target
- Failure modes in fast handoffs
Page outline Jump by section
Introduction
A detector cannot produce useful evidence if it identifies an unusual object only after it has already left the field of view. For automated instrumented UFO (or UAP) detectors, one of the most important edge-computing tasks is therefore the real-time camera handoff: using a wide-field sensor to detect a fast-moving target and immediately cue a second, narrower instrument before the event disappears. The decision must happen beside the instruments, typically within fractions of a second, because transmitting video to a remote server, waiting for analysis and then issuing a command introduces delays that often exceed the lifetime of the event. Modern observatory designs therefore treat target handoff as a local control problem rather than a post-processing task, combining rapid detection, prediction and coordinated sensor control to maximise the chance of obtaining calibrated, higher-quality observations. [arXiv]arxiv.orgarXiv Galileo Project Observatory Class System ArchitectureGalileo Project Observatory Class System ArchitectureMay 30, 2025…

Why remote review is too slow
A wide-field camera is excellent at watching the whole sky, but it sacrifices detail to achieve that coverage. A zoom camera or telescope provides much richer imagery, yet it can only observe a tiny portion of the sky at any instant. A successful station therefore depends on moving seamlessly from one to the other.
The difficulty is timing. Even on a fast network, uploading imagery to a remote data centre, analysing it and returning a steering command can take hundreds of milliseconds or several seconds. Many transient aerial events—whether aircraft flashes, meteors, satellites, birds, drones or genuinely unexplained observations—may have changed direction or disappeared completely during that interval. Edge computing avoids this delay by allowing the observatory computer to make immediate decisions from locally available sensor data. The Galileo Project’s Observatory Class Integrated Computing Platform explicitly separates an on-site Edge Computing Subsystem, responsible for real-time sensor optimisation and control, from later off-site scientific analysis. [arXiv]arxiv.orgarXiv Galileo Project Observatory Class System ArchitectureGalileo Project Observatory Class System ArchitectureMay 30, 2025…
This division also preserves evidence. Instead of waiting for human judgement, the station can immediately save high-rate imagery, retain pre-trigger frames, synchronise timestamps and command additional instruments while the target remains observable. Those actions cannot usually be reconstructed afterwards.
How wide and narrow sensors share a target
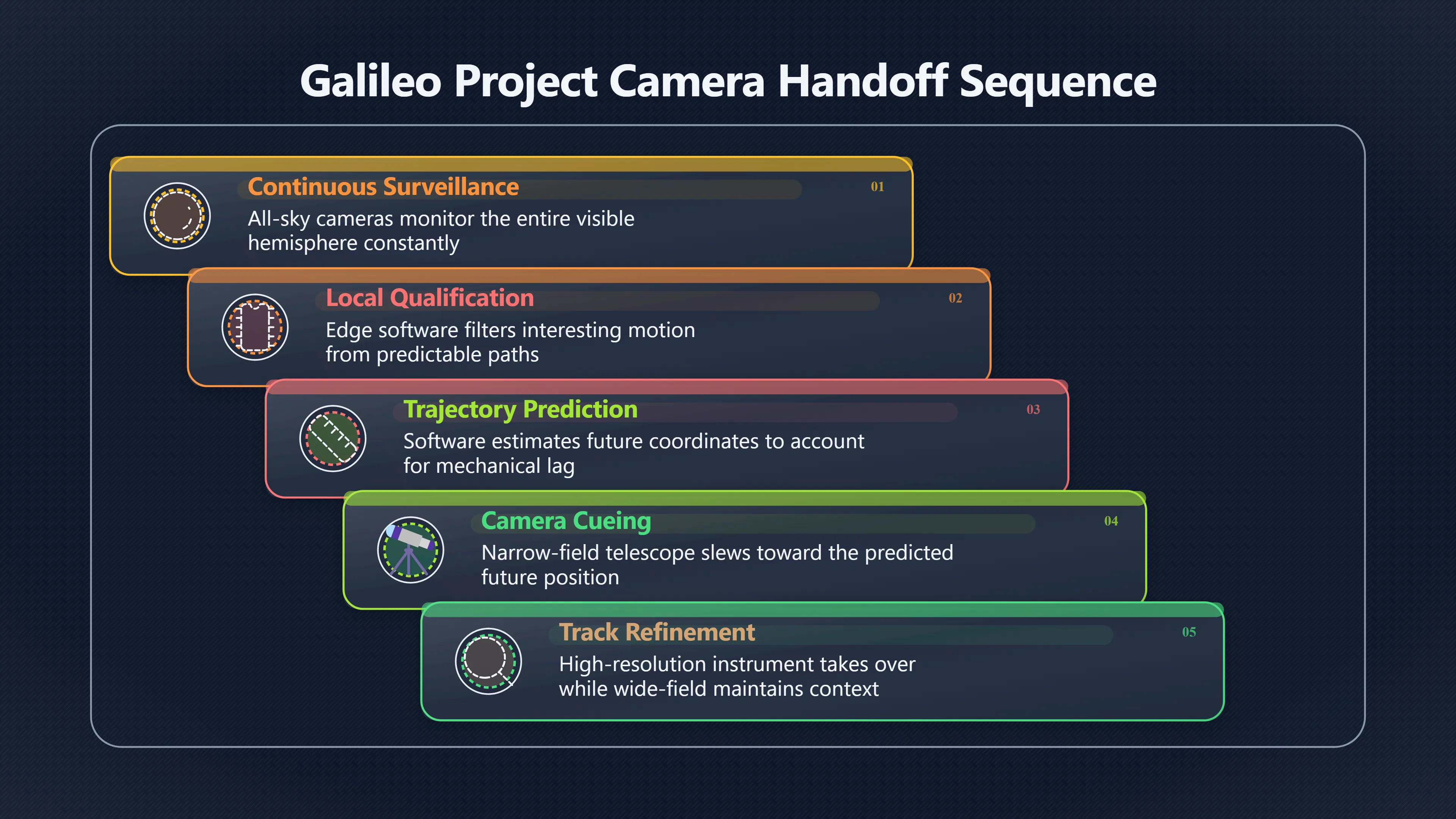
The handoff mechanism follows a sequence rather than a single command. Although implementations differ, the basic process is consistent across many automated observing systems.
- Continuous surveillance. One or more all-sky optical or infrared cameras watch the entire visible hemisphere and continuously detect moving objects.
- Local qualification. Edge software determines whether the motion appears sufficiently interesting to justify additional resources. Ordinary aircraft identified through ADS-B broadcasts or predictable satellites may be deprioritised, while unknown or ambiguous tracks receive higher priority.
- Trajectory prediction. Rather than aiming at the object’s current location, the software predicts where it will be after allowing for camera movement and processing delays.
- Camera cueing. A pan-tilt-zoom camera or narrow-field telescope slews toward the predicted position.
- Track refinement. Once the narrow-field sensor acquires the object, tracking transfers from the wide-field detector to the higher-resolution instrument while the all-sky camera continues providing broader situational awareness.
This predictive step is particularly important because mechanical motion is never instantaneous. Research on pan-tilt-zoom tracking consistently shows that successful tracking depends not only on detecting the target but also on compensating for camera movement delays and processing latency. [arXiv]arxiv.orgReproducible Evaluation of Pan-Tilt-Zoom Trackingby G Chen · 2015 · Cited by 29 — In this paper, we propose a new evaluation framewo…
Why prediction matters more than raw speed
A common misconception is that faster motors alone solve the problem. In practice, every component contributes delay:
- Image exposure time.
- Sensor readout.
- Object detection.
- Trajectory estimation.
- Motor acceleration.
- Camera settling.
- Autofocus and exposure adjustment.
By the time a camera physically points towards the detected location, the object may already have moved significantly.
Consequently, many tracking systems estimate the future position rather than chasing the current one. Similar ideas appear in satellite surveillance, where a wide-field detection camera predicts the future sky coordinates of a moving object and transmits those coordinates to a narrow-field telescope before the target arrives there. This allows the higher-resolution instrument to intercept rather than pursue the object. [conference.sdo.esoc.esa.int]conference.sdo.esoc.esa.intThe software is able to control the acquisition…Read more…
For an automated UAP observatory, the principle is identical even though the objects of interest are different.

Why multiple sensors improve the handoff
A camera handoff is stronger when more than one sensor supports the decision.
Instead of relying solely on visible imagery, an observatory may combine:
- optical all-sky cameras,
- infrared cameras,
- aircraft transponder receivers,
- weather sensors,
- radio-frequency detectors,
- microphones,
- precise GPS timing.
The edge computer fuses these signals before deciding whether to redirect scarce tracking resources. A moving heat source that lacks an ADS-B identity, for example, may justify a faster response than a conventional aircraft already identified independently. Likewise, coincident detections across optical and infrared channels provide greater confidence that the system is reacting to a genuine external object rather than image noise.
The Galileo Project’s observatory architecture was designed around precisely this multimodal approach, integrating optical, infrared and other sensor streams under a single edge-computing framework to improve data quality before later scientific analysis. [arXiv]arxiv.orgarXiv Galileo Project Observatory Class System ArchitectureGalileo Project Observatory Class System ArchitectureMay 30, 2025…
Failure modes in fast handoffs
Real-time handoffs are valuable precisely because they are difficult. Several failure modes repeatedly appear in tracking research and practical observatory design.
False triggers
Cloud edges, insects close to the lens, birds, lens flare and reflections can all resemble fast-moving targets. An unnecessary handoff wastes valuable observing time and may cause the narrow-field camera to miss a genuinely interesting event occurring elsewhere. The Galileo Project’s commissioning work demonstrates how large numbers of apparently unusual trajectories ultimately prove to be ordinary phenomena after calibration and review, highlighting why automated qualification must be conservative. [arXiv]arxiv.orgOpen source on arxiv.org.
Mechanical lag
Pan-tilt units have finite acceleration and cannot instantly rotate through large angles. Long slews increase the probability that the object exits the observable region before acquisition.

Narrow-field acquisition failure
The zoom camera may point accurately yet still fail because autofocus is incomplete, exposure settings are unsuitable or the object is smaller than expected. The wider camera therefore remains essential as the primary tracker until positive acquisition occurs.
Timing errors
Even small timestamp mismatches between sensors complicate reconstruction. If infrared, optical and metadata disagree by fractions of a second, investigators may struggle to prove that different sensors observed the same object.
Resource conflicts
Only one narrow-field camera may be available. When several moving objects appear simultaneously, the edge computer must prioritise which one deserves tracking. Those scheduling decisions directly affect the evidence ultimately collected.
What makes a successful handoff scientifically useful
From a scientific perspective, the value of a camera handoff is not simply obtaining a closer image. The objective is to transform a fleeting detection into a calibrated, time-synchronised, multi-instrument observation whose provenance can later be verified.
A successful handoff therefore produces more than a zoomed picture. It preserves continuous tracking from discovery through close observation, maintains precise timestamps, records camera orientation, stores pre-trigger context, and keeps wide-field imagery available so investigators can reconstruct exactly how the event evolved. By making these decisions locally while the object is still present, an automated sky station greatly increases the chance that a short-lived event leaves evidence suitable for later technical analysis rather than another isolated, difficult-to-interpret video clip. [arXiv]arxiv.orgarXiv Galileo Project Observatory Class System ArchitectureGalileo Project Observatory Class System ArchitectureMay 30, 2025…
Amazon book picks
Further Reading
Books and field guides related to Can a detector react before the object is gone?. Use these as the next step if you want deeper reading beyond the article.
Artificial Intelligence
Rating: 4.5/5 from 10 Google Books ratings
Provides decision-making concepts for automated control.
Computer Vision
First published 2010. Subjects: Computer algorithms, Bildverarbeitung, Computer vision, Image processing, Maschinelles Sehen.
eBay marketplace picks
Marketplace Samples
Live-tested eBay searches with available results related to this page.




Endnotes
-
Source: arxiv.org
Title: arXiv Galileo Project Observatory Class System Architecture
Link: https://arxiv.org/abs/2506.00125Source snippet
Galileo Project Observatory Class System ArchitectureMay 30, 2025...
Published: May 30, 2025
-
Source: arxiv.org
Link: https://arxiv.org/abs/2411.07956 -
Source: arxiv.org
Link: https://arxiv.org/html/2506.00125v1Source snippet
1 Introduction30 May 2025 — A system designed for the comprehensive scientific study of aerial phenomena which integrates multiple sensor...
Published: May 2025
-
Source: arxiv.org
Link: https://arxiv.org/abs/1505.04502Source snippet
Reproducible Evaluation of Pan-Tilt-Zoom Trackingby G Chen · 2015 · Cited by 29 — In this paper, we propose a new evaluation framewo...
-
Source: arxiv.org
Title: arXiv Evaluation of trackers for Pan-Tilt-Zoom Scenarios
Link: https://arxiv.org/abs/1711.04260 -
Source: conference.sdo.esoc.esa.int
Link: https://conference.sdo.esoc.esa.int/proceedings/neosst2/paper/16/NEOSST2-paper16.pdfSource snippet
The software is able to control the acquisition...Read more...
Additional References
-
Source: science.gov
Link: https://www.science.gov/topicpages/n/narrow-band%2Bimaging%2Bsystem -
Source: ictp-saifr.org
Link: https://www.ictp-saifr.org/wp-content/uploads/2023/03/CTA-ICTP-SAIFR_Instrumentation_2023_compressed.pdfSource snippet
Cherenkov Telescope Array InstrumentationNew medium-size dual-mirror telescope technology for CTA. – 9.7 m primary mirror & 5.4 m segment...
-
Source: roe.ac.uk
Link: https://www.roe.ac.uk/ifa/wfau/Source snippet
Wide Field Astronomy Unit (WFAU)The Wide Field Astronomy Unit at the IfA undertakes two main tasks: Provides science-ready queryable surv...
-
Source: avi-loeb.medium.com
Link: https://avi-loeb.medium.com/commissioning-data-on-half-a-million-objects-in-the-sky-from-the-galileo-project-observatory-are-a23bd084233aSource snippet
Data on Half a Million Objects in the Sky from...Commissioning Data on Half a Million Objects in the Sky from the Galileo Project Observ...
-
Source: labs.dese.iisc.ac.in
Link: https://labs.dese.iisc.ac.in/neuronics/wp-content/uploads/sites/16/2026/05/20260124032435_643668_9828_Final_Submission.pdfSource snippet
y, high dy- namic range, and sparse output, enabling efficient tracking of high- speed objects at low data...Read more...
-
Source: ctao.org
Title: the sst camera prototype records first signals during test campaign
Link: https://www.ctao.org/news/the-sst-camera-prototype-records-first-signals-during-test-campaign/Source snippet
The SST Camera Prototype Records First Signals During...13 Aug 2025 — For the SST, the smallest of the CTAO's three telescope types, the...
-
Source: dokumen.pub
Link: https://dokumen.pub/14th-chaotic-modeling-and-simulation-international-conference-springer-proceedings-in-complexity-3030969630-9783030969639.htmlSource snippet
ewly proposed chaos systems in two main [categories]({{ 'categories/' | relative_url }}): continuous-time systems...Read more...
-
Source: ntrs.nasa.gov
Title: Adaptive Optics LST Paper Feb 2026
Link: https://ntrs.nasa.gov/api/citations/20260001714/downloads/Adaptive%20Optics%20LST%20Paper%20Feb%202026.pdfSource snippet
first adaptive optics closed loop imaging...by E Peretz · 2026 — We used the Keck II telescope to image the 1550 nm laser source from bo...
-
Source: hal.science
Title: final 2025 Event based object tracking Yufan Kang 2
Link: https://hal.science/hal-05542491/file/final-2025Event_based_object_tracking__Yufan_Kang-2.pdfSource snippet
EDFT, a real-time 6-DoF object tracker that uses only a monocular event camera and a 3D model. At the core is an event-based...Read more...
-
Source: universetoday.com
Title: an all sky infrared camera could search for alien spacecraft 1
Link: https://www.universetoday.com/articles/an-all-sky-infrared-camera-could-search-for-alien-spacecraft-1Source snippet
An All-Sky Infrared Camera Named Dalek Continues...8 Apr 2025 — A new study led by the Harvard-Smithsonian Center for Astrophysics (CfA)...
Topic Tree