Within ADS B
Why Seconds Matter in UAP Footage
Small clock errors, ADS-B latency and update gaps can make a real aircraft look offset from the video detection.
On this page
- ADS B latency and update intervals
- Camera clocks and recording timestamps
- Choosing match windows without hiding anomalies
Page outline Jump by section
Introduction
A convincing match between an aircraft track and an object in video depends on more than position alone. The timing of both data streams must also agree. Even a clock error of one or two seconds can make a genuine aircraft appear noticeably displaced in the image, particularly when it is close to the camera or moving quickly across the field of view. For automated instrumented UAP detectors, poor time alignment can therefore create both false positives (“the object does not match any aircraft”) and false negatives (“the aircraft appears to match when it does not”).
 This is not simply a software nuisance. ADS-B data, camera recordings and computer processing pipelines all introduce their own timing uncertainties. A robust system measures and manages these uncertainties rather than assuming every timestamp is exact. That approach allows aircraft to be rejected confidently when they truly do not match, while avoiding the mistake of declaring an anomaly because two clocks disagree.
This is not simply a software nuisance. ADS-B data, camera recordings and computer processing pipelines all introduce their own timing uncertainties. A robust system measures and manages these uncertainties rather than assuming every timestamp is exact. That approach allows aircraft to be rejected confidently when they truly do not match, while avoiding the mistake of declaring an anomaly because two clocks disagree.
Why identical timestamps rarely exist
An aircraft’s ADS-B broadcast and a camera frame are produced by different devices with independent clocks. Each stage introduces delay before the information reaches the analysis software.
ADS-B messages are transmitted repeatedly, but the transmitted position itself does not carry a universal timestamp. Ground receivers generally timestamp the instant they receive the radio message, meaning the recorded time reflects reception rather than the precise moment the aircraft determined its position. Receiver hardware, decoding software and network forwarding each contribute small delays, while update intervals mean the reported position may already be up to roughly a second old before interpolation is attempted. [FlightAware Discussions+2OpenSky Network]discussions.flightaware.comFlightAware DiscussionsPosition and Timestamp accuracies - GeneralNov 1, 2018 — From what I understand, the GPS timestamp on most ADS-B r…
Video systems have similar problems. A displayed timestamp may originate from an internal camera clock, the recording computer, or metadata added during encoding. Exposure duration, buffering, compression and file writing all introduce additional latency, while inexpensive camera clocks may drift by seconds or minutes unless synchronised to a trusted time source. [Amped Software Blog+2i-PRO]blog.ampedsoftware.comAmped Software BlogTimestamps: Not Always Showing the Right Time - Amped Blog6 Apr 2021 — DVRs often rely on an internal system clock tha…
The consequence is that two systems can each report apparently precise UTC times while still disagreeing by enough to affect image matching.
ADS-B latency and update intervals
For aircraft correlation, it is important to distinguish between latency and sampling interval.
Latency describes the delay between an event occurring and the analysis software receiving the information. Sampling interval describes how often position reports are available. Both influence matching accuracy.
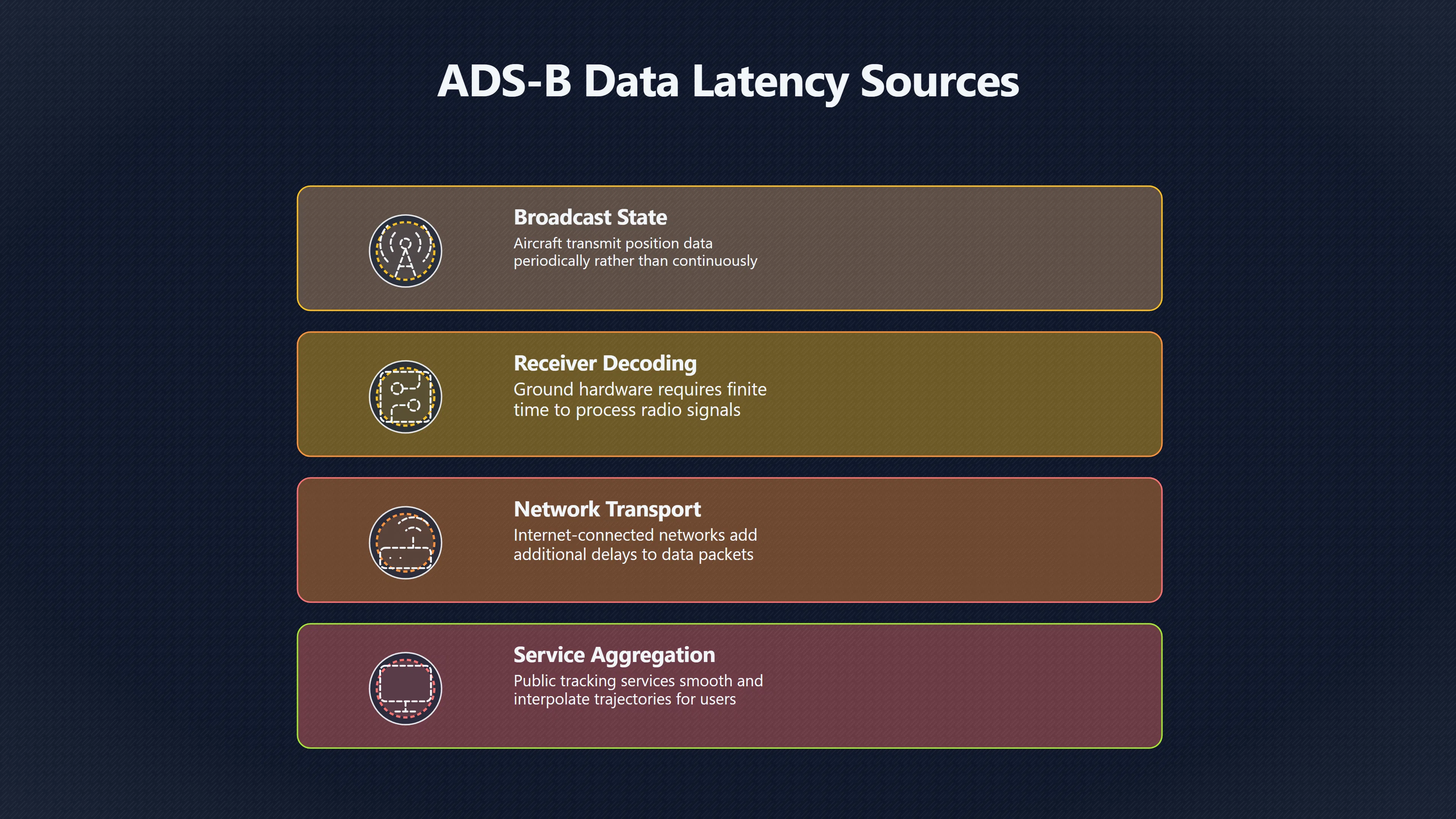
Several mechanisms contribute:
- Aircraft broadcast state information periodically rather than continuously.
- Ground receivers require finite time to detect and decode each transmission.
- Internet-connected receiver networks may add additional transport delay.
- Public tracking services often smooth, interpolate or aggregate trajectories before presentation.
These effects are usually small for aviation purposes, but they matter when comparing a single video frame with a predicted aircraft position. A jet travelling approximately 250 m/s moves about 250 metres in one second. At moderate viewing distances that displacement may shift the projected image position by many pixels, enough for a naïve matching algorithm to reject the aircraft incorrectly.
Operational aviation standards budget ADS-B timing errors carefully. Studies of uncompensated ADS-B latency have found that compliant systems generally remain well within the timing tolerances defined for surveillance applications, with average uncompensated latencies typically much smaller than one second. However, these aviation tolerances are designed for safe tracking rather than pixel-perfect alignment with optical imagery. [arXiv]arxiv.orgarXiv A study of uncompensated latency in ADS-B reportsA study of uncompensated latency in ADS-B reportsAugust 14, 2020…
Camera clocks and recording timestamps
The camera side is often the weaker part of the timing chain.
Consumer cameras, security cameras and astronomical imaging systems frequently rely on inexpensive internal oscillators. Unless periodically synchronised, these clocks naturally drift over hours or days. Forensic video analysts routinely encounter recordings whose embedded timestamps differ substantially from real time because the camera clock was never corrected after installation. [Amped Software Blog+2TRID]blog.ampedsoftware.comAmped Software BlogTimestamps: Not Always Showing the Right Time - Amped Blog6 Apr 2021 — DVRs often rely on an internal system clock tha…
Several additional effects complicate interpretation:
- Frame rate quantisation: At 30 frames per second, each frame represents approximately 33 milliseconds. The recorded event may occur anywhere within that interval.
- Rolling shutter exposure: Different rows of the sensor are exposed at slightly different times, introducing small geometric timing differences for rapidly moving objects.
- Compression pipelines: Video encoders may buffer frames before writing them to storage.
- Displayed versus embedded timestamps: The visible clock burned into a recording may not exactly match the internal metadata used by software.
These factors are usually insignificant for casual viewing but become important when determining whether a bright object occupies precisely the same position as an aircraft track.

Choosing match windows without hiding anomalies
Because no measurement is perfect, automated UAP systems should avoid using a single exact timestamp as a pass-or-fail criterion.
Instead, they should evaluate whether the aircraft trajectory intersects the observed object within a documented uncertainty window that combines:
- estimated camera clock accuracy;
- ADS-B update interval;
- receiver latency;
- frame timing uncertainty; and
- geometric sensitivity at the aircraft’s range.
This uncertainty should be propagated mathematically rather than chosen arbitrarily. A detector that quietly expands the allowable window until every observation matches an aircraft risks masking genuinely unexplained events. Conversely, requiring perfect timestamp agreement guarantees unnecessary false anomalies.
A better approach is to report confidence levels. For example, software might classify a detection as:
- High-confidence aircraft match when both spatial and temporal uncertainties overlap comfortably.
- Possible aircraft match when timing uncertainty dominates the result.
- No supported aircraft match only after accounting explicitly for all known timing errors.
Making the uncertainty visible allows later reviewers to understand whether a mismatch reflects genuine evidence or simply insufficient timing precision.
Using aircraft as timing references
Known aircraft provide a practical way to verify an observing station’s timing.
If the camera orientation has already been calibrated, repeated overflights by aircraft with reliable ADS-B tracks allow software to estimate systematic clock offsets. If every aircraft consistently appears 0.8 seconds ahead of its predicted position, the problem is more likely a station timing bias than unusual aircraft behaviour.
Projects developing automated sky-monitoring systems have already used ADS-B-equipped aircraft as calibration targets for camera geometry. The same philosophy extends naturally to timing calibration: repeated observations of known aircraft can reveal persistent offsets between the video system and the tracking data before any alleged UAP event occurs. [EUROCONTROL]eurocontrol.intAutomatic dependent surveillance – broadcast (ADS-B)ADS-B is a Surveillance technique that relies on aircraft or airport vehic…
In larger sensor networks, synchronisation protocols such as the Network Time Protocol (NTP) and, where higher precision is required, the Precision Time Protocol (PTP) are widely used to keep devices aligned to a common time reference. PTP can achieve substantially higher precision than conventional NTP in suitable network environments, making it attractive where multiple cameras or sensors must be fused accurately. [NetworkLessons.com+2Bodet Time]networklessons.comPrecision Time Protocol (PTP) ExplainedNTP is accurate, under ten milliseconds. PTP, however, is accurate up to less than a microsecond a…
A timing mismatch is not evidence of an anomaly
One of the easiest mistakes in UAP analysis is treating a poor aircraft correlation as evidence that the observed object cannot be an aircraft.
In reality, timing uncertainty is itself a measurable quantity. A detector should first ask:
- Are both clocks referenced to the same time standard?
- Has clock drift been measured recently?
- Is the ADS-B position being interpolated correctly between broadcasts?
- Has processing latency been accounted for?
- Is the remaining spatial discrepancy larger than the combined timing uncertainty predicts?
Only after those questions have been answered can a failure to match become informative.
For automated instrumented UAP detectors, timestamp integrity is therefore part of the measurement system rather than an administrative detail. Seconds—and sometimes fractions of a second—can determine whether an ordinary aircraft is correctly identified or mistakenly classified as something unexplained.

Amazon book picks
Further Reading
Books and field guides related to Why Seconds Matter in UAP Footage. Use these as the next step if you want deeper reading beyond the article.
Digital Video and HD
Helps readers understand video frame timing, recording pipelines, and timestamp-related limitations.

Introduction to Avionics Systems
First published 2011. Subjects: Engineering, Astronautics, Electronics, Avionics.

Fundamentals of air traffic control
First published 1990. Subjects: Air traffic control, Private flying.
Understanding GPS/GNSS
First published 2017. Subjects: Global Positioning System, TECHNOLOGY & ENGINEERING, Military Science.
eBay marketplace picks
Marketplace Samples
Example marketplace items related to this page. Use the search link to explore similar finds on eBay.



Endnotes
-
Source: discussions.flightaware.com
Link: https://discussions.flightaware.com/t/position-and-timestamp-accuracies/42160Source snippet
FlightAware DiscussionsPosition and Timestamp accuracies - GeneralNov 1, 2018 — From what I understand, the GPS timestamp on most ADS-B r...
-
Source: opensky-network.org
Link: https://opensky-network.org/about/faqSource snippet
Frequently Asked QuestionsThe data includes reception timestamps, the position of the receiver, and the raw ADS-B message. We use this da...
-
Source: eurocontrol.int
Link: https://www.eurocontrol.int/service/automatic-dependent-surveillance-broadcastSource snippet
Automatic dependent surveillance – broadcast (ADS-B)ADS-B is a Surveillance technique that relies on aircraft or airport vehic...
-
Source: i-pro.com
Title: eu en124131
Link: https://i-pro.com/products_and_solutions/eu-en/surveillance/faq-list/eu-en124131Source snippet
What should I do if my camera Timestamp does not match...16 Oct 2025 — If the VI Server has been configured as an NTP Server, then confi...
-
Source: arxiv.org
Title: arXiv A study of uncompensated latency in ADS-B reports
Link: https://arxiv.org/abs/2008.06352Source snippet
A study of uncompensated latency in ADS-B reportsAugust 14, 2020...
Published: August 14, 2020
-
Source: opensky-network.org
Link: https://opensky-network.org/files/publications/dasc17.pdfSource snippet
S downlink message, OpenSky stores additional metadata. Depending on the receiver hardware, this includes precise timestamps...Read more...
-
Source: trid.trb.org
Link: https://trid.trb.org/View/2539628Source snippet
Video analysis plays a major role in many forensic fields.Read more...
-
Source: networklessons.com
Link: https://networklessons.com/ip-services/precision-time-protocol-ptp-explainedSource snippet
Precision Time Protocol (PTP) ExplainedNTP is accurate, under ten milliseconds. PTP, however, is accurate up to less than a microsecond a...
-
Source: bodet-time.com
Title: 1950 implementing a time server for video surveillance purposes
Link: https://www.bodet-time.com/resources/blog/1950-implementing-a-time-server-for-video-surveillance-purposes.htmlSource snippet
Implementing a time server for video surveillance purposesJun 20, 2024 — It is recommended to use a time server compatible with NTP, that...
-
Source: discussions.flightaware.com
Title: software timestamp source
Link: https://discussions.flightaware.com/t/software-timestamp-source/88156Source snippet
timestamp source - ADS-B Flight Tracking30 May 2023 — The local time displayed on the plane in your software must have a source-perhaps i...
Published: May 2023
-
Source: discussions.flightaware.com
Title: mlat on pi
Link: https://discussions.flightaware.com/t/mlat-on-pi/16283Source snippet
on PI? - ADS-B Flight TrackingFeb 27, 2015 — The problem is that there's no way to correlate the GPS time information with the time that...
-
Source: discussions.flightaware.com
Title: mlat coverage
Link: https://discussions.flightaware.com/t/mlat-coverage/19014Source snippet
ADS-B Flight Tracking16 Sept 2016 — Multilateration is not supported directly from the Radarcape feeder software at the moment, which is...
-
Source: opensky-network.org
Title: Facts and Figures on SSR Mode S and ADS-B Usageby M Schäfer · Cited by 58 —
Link: https://opensky-network.org/files/publications/dasc2016.pdfSource snippet
Mode S and 1090ES ADS-B usage from the OpenSky Network. By analyzing the large host of real-world...Read more...
-
Source: opensky-network.org
Link: https://opensky-network.org/files/publications/cpss15.pdfSource snippet
Lightweight Location Verification in Air Traffic Surveillance...by M Strohmeier · Cited by 80 — For our evaluation, we rely on real-worl...
-
Source: blog.ampedsoftware.com
Link: https://blog.ampedsoftware.com/2021/04/06/timestamps-not-always-showing-the-right-timeSource snippet
Amped Software BlogTimestamps: Not Always Showing the Right Time - Amped Blog6 Apr 2021 — DVRs often rely on an internal system clock tha...
-
Source: dictionary.cambridge.org
Link: https://dictionary.cambridge.org/dictionary/english-portuguese/forensicSource snippet
Portuguese translation - Cambridge DictionaryMay 6, 2026 — related to scientific methods of solving crimes, involving examining the obj...
Published: May 6, 2026
-
Source: journals.open.tudelft.nl
Link: https://journals.open.tudelft.nl/joas/article/view/7882/6276Source snippet
Techniques for ADS-B Trajectory Preprocessingby X Olive · 2024 · Cited by 10 — In this section, we present various [categories]({{ 'categories/' | relative_url }}) of filters...
-
Source: journals.open.tudelft.nl
Link: https://journals.open.tudelft.nl/joas/article/view/7895/6437Source snippet
more...
Additional References
-
Source: researchgate.net
Link: https://www.researchgate.net/publication/399539984_FORENSIC_ANALYSIS_OF_TEMPORAL_INCONSISTENCIES_AND_METADATA_DISCREPANCIES_IN_CCTV_FOOTAGE_A_CASE_STUDYSource snippet
forensic analysis of temporal inconsistencies and metadata...9 Jan 2026 — This case study critically examines temporal inconsistencies a...
-
Source: researchgate.net
Link: https://www.researchgate.net/figure/ADS-B-sync-hronization-to-radar-scan_fig3_224338492Source snippet
ADS-B sync hronization to radar scan.Time synchronization is needed because radar reports are synchronized to the radar scan, whereas AD...
-
Source: jetvision.de
Link: https://www.jetvision.de/manuals/Tbl_Compare_Devices_V2.pdfSource snippet
Jetvision ADS-B DevicesMode-S & ADS-B. ⚫. ⚫. ⚫. ⚫. ⚫. Mode-A/C. ⚫. ⚫. ⚫. ⚫. ⚫. FLARM. ⚪. ⚪. ⚪. ⚪. ⚫ 1). 1) with FLARM option installed. S...
-
Source: multilateration.info
Link: https://www.multilateration.info/downloads/MLAT-ADS-B-Reference-Guide.pdfSource snippet
requires no additional avionics equipment, as it uses replies from Mode A, C and. S transponders, as well as military. IFF and ADS-B...R...
-
Source: traffic-viz.github.io
Link: https://traffic-viz.github.io/data_sources/opensky_db.htmlSource snippet
You may pass requests based on time ranges, callsigns, aircraft, areas, serial numbers for receivers, or airports...Read more...
-
Source: youtube.com
Link: https://www.youtube.com/watch?v=x3-Oytqnc6cSource snippet
[Galileo]({{ 'galileo/' | relative_url }}) Project Tracking AI explains the processing pipelines and data correlation challenges involved in verifying sensor tracking again...
-
Source: araa.asn.au
Link: https://www.araa.asn.au/acra/acra2008/papers/pap112s1.pdfSource snippet
ion of multiple sensors taking into account clock drifts, inaccuracy of timestamps, and other unexpected...
-
Source: raphael-voges.de
Link: https://raphael-voges.de/publication/voges-2018-b/voges-2018-b.pdfSource snippet
we acquire data in a short time frame such that any drift between the sensors' clocks can be neglected...
-
Source: researchgate.net
Title: 390064664 Filtering Techniques for ADS B Trajectory Preprocessing
Link: https://www.researchgate.net/publication/390064664_Filtering_Techniques_for_ADS-B_Trajectory_PreprocessingSource snippet
Filtering Techniques for ADS-B Trajectory Preprocessing18 Mar 2025 — We also illustrate the results of the filtering with trajectory data...
-
Source: lifetips.alibaba.com
Link: https://lifetips.alibaba.com/tech-efficiency/build-a-14-video-camera-stabilizerSource snippet
alibaba.comDon't Build a 14-Video Camera Stabilizer—Sync & Stream InsteadBuilding a 14-camera stabilizer is inefficient, error-prone, and...
Topic Tree