Within Triangulation
When two cameras disagree on time
Even tiny timing errors can turn two good sky videos into a misleading distance estimate.
On this page
- Why frame timing matters for range
- GPS timing versus ordinary camera clocks
- How timing errors distort speed and altitude
Page outline Jump by section
Introduction
Multi-site triangulation only works if two or more stations measure the same object at the same instant. Even when cameras are accurately calibrated and positioned, poor clock synchronisation can produce incorrect estimates of range, altitude and speed because each camera may be recording the object at a slightly different point along its flight path. For automated instrumented UFO or UAP detector networks, timing is therefore not a secondary engineering detail but one of the core measurement requirements. Without trustworthy timestamps, a convincing-looking geometric reconstruction can be physically wrong, while with accurate synchronisation the same network can distinguish nearby objects from distant ones with much greater confidence. [ILRS]ilrs.gsfc.nasa.govSynchronization.Read moreThe Role of GPS in Precise Time and Frequency…August 24, 2001 — Once the relationship between the receiver clock and GPS time is e…

Why frame timing matters for range
Triangulation assumes that every line of sight corresponds to one physical position in space. If Camera A records an object at 21:15:32.250 while Camera B actually records it at 21:15:32.330, the object may already have travelled a significant distance before the second measurement. The software still intersects the two viewing rays, but they no longer describe the same point in space.
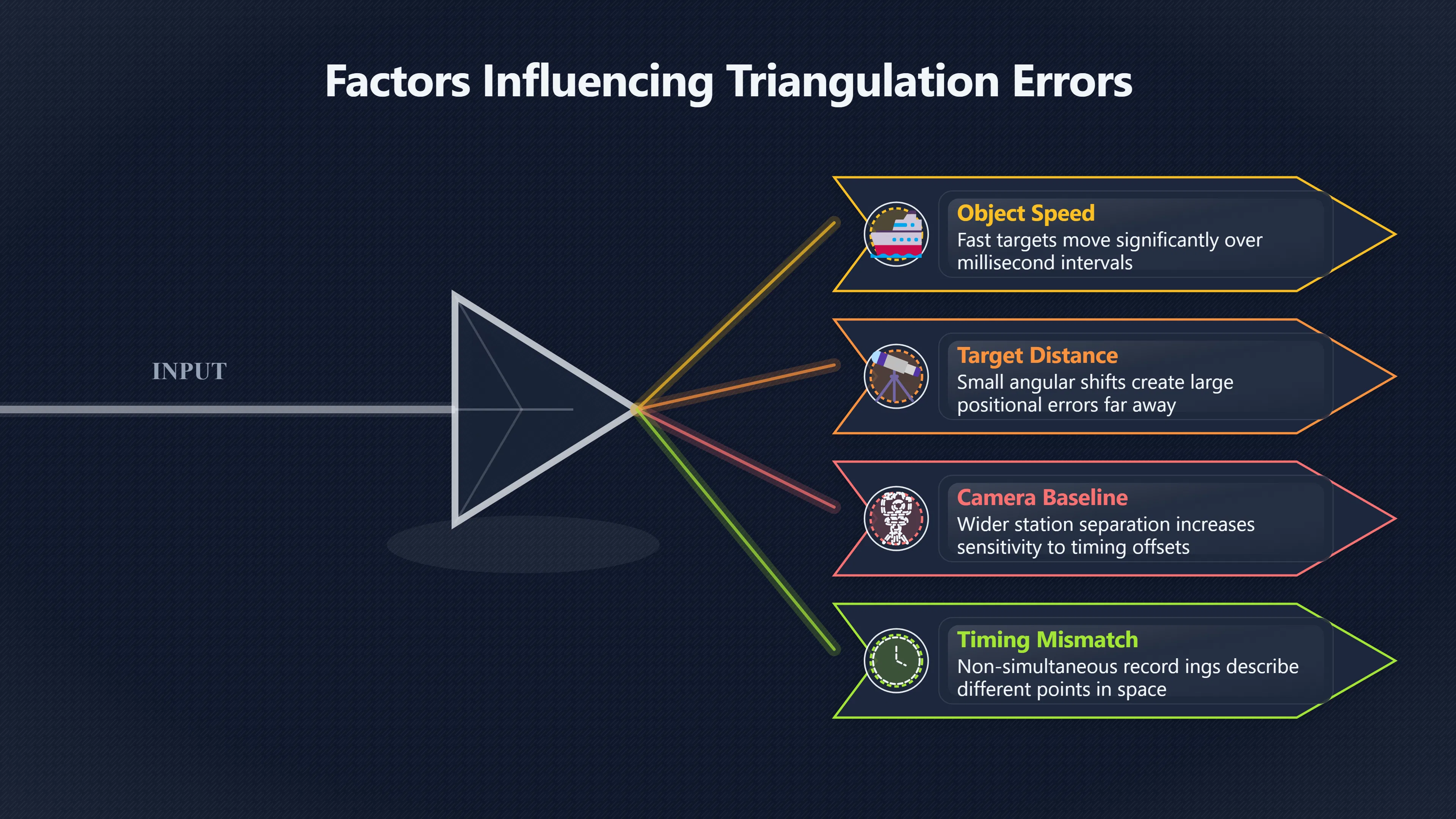
The resulting error depends on three interacting factors:
- Object speed. Fast-moving aircraft, meteors or satellites change position noticeably even over tens of milliseconds.
- Distance from the cameras. Small angular shifts translate into large positional errors for distant targets.
- Camera baseline. Stations separated by kilometres gain better ranging capability but also become more sensitive to timing errors because the viewing geometry is tighter.
The consequence is that timing errors can masquerade as geometric errors. A reconstructed track may appear higher, lower, nearer or farther away than reality, even though each individual camera measured its viewing angle correctly.
Repeated over many frames, these mismatches can distort an entire trajectory. Speed estimates become unreliable because they are based on successive reconstructed positions that already contain systematic timing offsets rather than random measurement noise.
GPS timing versus ordinary camera clocks
Consumer cameras are generally designed to record photographs or video, not to participate in distributed scientific measurements. Their internal clocks typically prioritise keeping approximate wall-clock time rather than precisely marking the instant each frame was exposed.
Several limitations make ordinary camera clocks unsuitable for precision triangulation:
- Internal oscillators drift with temperature and age.
- Different cameras rarely start recording at exactly the same instant.
- Video files often record presentation timing rather than true sensor exposure timing.
- Network Time Protocol (NTP) usually synchronises computers to within milliseconds under favourable conditions, but network delays introduce uncertainty that varies over time. [Wikipedia]WikipediaNetwork Time ProtocolNetwork Time Protocol
Scientific imaging systems instead often rely on external timing references. A common approach is a Global Navigation Satellite System (GNSS), such as GPS, providing a one-pulse-per-second (1 PPS) signal that disciplines the local clock. Hardware triggering can then align image acquisition directly to this reference rather than relying solely on software timestamps.
GPS-disciplined timing routinely reaches sub-microsecond or microsecond-level synchronisation when properly implemented, while Precision Time Protocol (IEEE 1588 PTP) can provide comparable performance on suitable local networks. These approaches are widely used in measurement, industrial control and scientific instrumentation because they reduce both clock drift and timestamp uncertainty. [ILRS+2University of Manchester]ilrs.gsfc.nasa.govSynchronization.Read moreThe Role of GPS in Precise Time and Frequency…August 24, 2001 — Once the relationship between the receiver clock and GPS time is e…
The distinction is important for automated UAP observatories. Synchronising computer clocks alone is not always enough if the camera sensor itself begins exposure independently of the recorded timestamp. The most robust systems synchronise both the clock and the image acquisition hardware.

How timing errors distort speed and altitude
A useful way to think about clock error is to imagine every camera observing the object slightly earlier or later than intended.
Suppose an aircraft moves at 250 m/s. A timing mismatch of:
- 1 millisecond corresponds to about 25 centimetres of travel.
- 10 milliseconds corresponds to roughly 2.5 metres.
- 100 milliseconds corresponds to about 25 metres.
For slower targets these distances shrink, but for meteors or satellites moving several kilometres per second they increase dramatically.
These offsets affect more than estimated position. Once three-dimensional positions are reconstructed over time, analysts calculate velocity and sometimes acceleration. Any systematic timestamp error therefore propagates into every downstream calculation.
This creates several failure modes:
- Incorrect altitude, because sightlines intersect at the wrong point.
- Incorrect horizontal position, especially for distant objects.
- Inflated or reduced speed, depending on the direction of the timing offset.
- Apparent manoeuvres caused by reconstruction artefacts rather than genuine motion.
In UAP investigations these errors matter because many extraordinary claims depend on inferred speed, acceleration or sudden changes of direction. If timing uncertainty is not quantified, those kinematic estimates become much less reliable.
Why synchronisation must be verified, not assumed
A common misconception is that matching video frame numbers proves synchronisation. In reality, cameras operating at nominally identical frame rates may begin recording at different times, drop frames or vary slightly in exposure timing.
For this reason, professional multi-sensor systems often validate synchronisation independently by observing a common timing signal or calibration event. Examples include:
- GPS-derived pulse-per-second signals.
- Hardware trigger lines shared between instruments.
- Flashing calibration LEDs driven by a common clock.
- Known astronomical events with predictable timing.
Verification allows analysts to estimate actual timing uncertainty instead of assuming perfect alignment.
This distinction is particularly important because clock drift is cumulative. Two cameras may agree closely when recording starts but gradually diverge over minutes or hours if they rely solely on free-running internal oscillators. Clock synchronisation research consistently identifies oscillator drift as a fundamental limitation requiring periodic correction or continuous disciplining. [Wikipedia]WikipediaClock synchronizationClock synchronization

The practical lesson for automated UAP detector networks
Within a multi-site automated detector, clock synchronisation should be treated as part of the measurement system rather than as a software convenience. A network with accurately calibrated optics but poorly synchronised clocks can produce convincing-looking three-dimensional tracks that are physically misleading.
Conversely, combining known station positions, calibrated camera geometry and hardware-grade time synchronisation allows triangulation software to associate observations with the same physical instant, making estimated range, altitude and speed substantially more trustworthy. This is why modern scientific sensor networks invest heavily in precise timing infrastructure: accurate clocks do not merely improve data quality—they determine whether independent observations can be combined into a valid physical measurement at all. [ILRS+2University of Manchester]ilrs.gsfc.nasa.govSynchronization.Read moreThe Role of GPS in Precise Time and Frequency…August 24, 2001 — Once the relationship between the receiver clock and GPS time is e…
Amazon book picks
Further Reading
Books and field guides related to When two cameras disagree on time. Use these as the next step if you want deeper reading beyond the article.
Astronomical image and data analysis
First published 2002. Subjects: Data processing, Imaging systems in astronomy, Imaging systems, Astronomy, data processing, Physics.
Handbook of CCD astronomy
First published 2006. Subjects: Charge coupled devices, Technique, Astronomy.
Practical Astronomy with Your Calculator Or Spreadsheet
Supports geometric timing calculations.
Understanding GPS/GNSS
First published 2017. Subjects: Global Positioning System, TECHNOLOGY & ENGINEERING, Military Science.
Endnotes
-
Source: ilrs.gsfc.nasa.gov
Title: Synchronization.Read more
Link: https://ilrs.gsfc.nasa.gov/docs/timing/gpsrole.pdfSource snippet
The Role of GPS in Precise Time and Frequency...August 24, 2001 — Once the relationship between the receiver clock and GPS time is e...
Published: August 24, 2001
-
Source: Wikipedia
Title: Network Time Protocol
Link: https://en.wikipedia.org/wiki/Network_Time_Protocol -
Source: Wikipedia
Title: Precision Time Protocol
Link: https://en.wikipedia.org/wiki/Precision_Time_Protocol -
Source: Wikipedia
Title: Clock synchronization
Link: https://en.wikipedia.org/wiki/Clock_synchronization -
Source: pure.manchester.ac.uk
Link: https://pure.manchester.ac.uk/ws/files/51574975/CSEE_JPES_Time_Sync.pdfSource snippet
University of ManchesterTime Synchronization for Transmission Substations Using...by PA Crossley · Cited by 50 — The results show a 1588...
Additional References
-
Source: ridgesolutions.ie
Title: raspberry pi and gps for testing camera image timestamps with ntp and pps
Link: https://www.ridgesolutions.ie/index.php/2016/08/29/raspberry-pi-and-gps-for-testing-camera-image-timestamps-with-ntp-and-pps/Source snippet
Raspberry Pi and GPS for Testing Camera Image Timestamps...29 Aug 2016 — A time-stamp's accuracy is partly dependent on how well the cam...
-
Source: pdfs.semanticscholar.org
Link: https://pdfs.semanticscholar.org/f223/12fcd33e047d3413ef090a7a9c97405fa3e2.pdfSource snippet
semanticscholar.orgTwist-n-Sync: Software Clock Synchronization with...by M Faizullin · 2021 · Cited by 17 — In this paper, we show the...
-
Source: uio.no
Title: l12 time and synchronization v24
Link: https://www.uio.no/studier/emner/matnat/fys/FYS3240/v24/lectures/l12—time-and-synchronization-v24.pdfSource snippet
University of OsloTime and synchronization18 Feb 2024 — The Network Time Protocol (NTP), designed to synchronize the clocks of computers...
-
Source: youtube.com
Title: How Military Sensors Proved UFO Craft Were Physically Real | WION Podcast
Link: https://www.youtube.com/watch?v=H6eK1VbrHPYSource snippet
Harvard's Alien Hunt: What They're Not Telling Us - YouTube Dr Brian Keating · 7.3K views...
-
Source: youtube.com
Title: How the [Galileo]({{ ‘galileo/’ | relative_url }}) Project is Changing the Game
Link: https://www.youtube.com/watch?v=56So2gXKFcgSource snippet
How Military Sensors Proved UFO Craft Were Physically Real | WION Podcast...
-
Source: researchgate.net
Link: https://www.researchgate.net/publication/301447264_Research_and_Implementation_of_high_accuracy_timing_method_based_on_GPS_PPS_in_spaceborne_remote_sensing_camerasSource snippet
January 2015. DOI:10.2991/...Read more...
Published: January 2015
-
Source: youtube.com
Title: Unidentified Anomalous Phenomena Independent Study Report
Link: https://www.youtube.com/watch?v=TQcqOW39kskSource snippet
How the Galileo Project is Changing the Game - Abby White | Merged EP0106...
-
Source: pureadmin.qub.ac.uk
Title: fbuil 04 00082
Link: https://pureadmin.qub.ac.uk/ws/portalfiles/portal/167420337/fbuil_04_00082.pdfSource snippet
Queen's University BelfastTime Synchronization for Wireless Sensors Using Low-...by KY Koo · 2019 · Cited by 14 — Time synchronization f...
-
Source: arxiv.org
Title: arXiv [Open-Source]({{ ‘open-source/’ | relative_url }}) Li DAR Time Synchronization System by Mimicking GNSS-clock
Link: https://arxiv.org/abs/2107.02625 -
Source: youtube.com
Title: Inside the AI Alien Hunting Project at Harvard
Link: https://www.youtube.com/watch?v=oDAY0_wRjxASource snippet
Unidentified Anomalous Phenomena Independent Study Report...
Topic Tree