Within Sky Detectors
Why UAP Speed Can Look Impossible
Many astonishing speed claims collapse when the object's distance, camera angle, and observer motion are not known.
On this page
- How parallax misleads viewers
- Why distance is hard from one camera
- How multi site observation changes the calculation
Page outline Jump by section
Introduction
Claims that a UAP has crossed the sky at impossible speed often rest on a hidden assumption: that the object is close, low, and moving under its own power. If its true distance is unknown, that assumption can be wrong by orders of magnitude. A nearby insect, a balloon at altitude, a distant aircraft, or a slow object seen from a fast-moving aircraft can all create a dramatic track on video. The image may be real, the witness may be sincere, and the speed claim may still collapse once range, viewing angle, wind, platform motion, and camera geometry are reconstructed.
This is why parallax and distance error sit near the centre of automated instrumented UFO detector design. A single camera can record bearing — where in the sky something appears — but bearing alone does not give range. Without range, there is no reliable size, altitude, velocity, or acceleration. NASA’s UAP study highlighted this broader problem in 2023: UAP analysis is hampered by poor calibration, missing sensor metadata, lack of multiple measurements, and lack of baseline data. [NASA Science]science.nasa.govNASA ScienceIndependent Study Team ReportThe study of Unidentified Anomalous Phenomena (UAP) presents a unique scientific opportunity tha…
How parallax makes ordinary motion look extraordinary
Parallax is the apparent shift of an object against its background when the observer moves. It is not a camera trick in the sense of a fake image; it is normal geometry. The same effect lets a passenger in a moving car see nearby fence posts sweep past quickly while distant hills barely appear to move. In UAP footage, the problem becomes sharper because the observer may be an aircraft, drone, or fast pan-tilt camera rather than a stationary person.
AARO’s 2024 information paper on forced perspective and parallax warns that these effects can frequently explain reports of excessive size or high speed. The key risk is that a fast-moving observer can make a slow or stationary object appear to race across the scene, especially when the object is seen against clouds, sea, or sky without a firm distance reference. [AARO]aaro.milEffect of Forced Perspective and Parallax View on UAPEffect of Forced Perspective and Parallax View on UAP…May 8, 2024 — the effects of forced perspective and parallax can frequently…
The mistake is usually not “the object did not move”. The mistake is “the object moved the way it appears to move in the frame”. A dot crossing a video frame is not a speed measurement until the analyst knows:
- how far away the dot is;
- how the camera was pointed and stabilised;
- how the observer platform moved;
- whether the background is near, distant, or effectively at infinity;
- whether the displayed range is measured, estimated, or locked to something else;
- how wind and known traffic fit the reconstruction.
That distinction matters for automated sky detectors because automation can create a false sense of authority. A timestamped clip from a fixed device looks more objective than an eyewitness story, but a single optical track still has the same geometric weakness: it supplies direction over time, not full three-dimensional motion.

The “Go Fast” case shows the trap clearly
The best public example is the U.S. Navy “Go Fast” video, recorded by a Forward Looking Infrared sensor on an F/A-18F off the eastern coast of Florida in January 2015. The clip appeared to show a round object moving rapidly near the ocean surface. AARO’s later case-resolution card assessed the object instead as being about 13,000 feet above the Atlantic, not near the water, with no anomalous performance characteristics. Its wind-compensated speed was assessed at roughly 5 to 92 mph. [AARO]aaro.milGo Fast Case ResolutionAARO GoFast Case ResolutionFebruary 24, 2025 — 6 Feb 2025 — Object Altitude (reported): Near ocean's surface. Object Altitude (assess…
That is not a minor correction. It changes the interpretation from “a small object screaming just above the sea” to “an unidentified object at altitude whose apparent motion is strongly affected by the observing aircraft’s motion”. Defence reporting on AARO’s presentation described the same conclusion: geospatial analysis and trigonometry put the object nearer 13,000 feet, while parallax from the moving platform made it look much faster over the water. [DefenseScoop]defensescoop.comDefense Scoop Pentagon's UAP office reviews findings on Go Fast, PuertoDefense Scoop Pentagon's UAP office reviews findings on Go Fast, Puerto
The case also shows why a detector system should not treat “unidentified” and “extraordinary” as synonyms. AARO did not definitively identify the Go Fast object; it narrowed the behaviour. That is a more useful scientific result than a dramatic label. The claim that matters most — anomalous speed — was not supported once distance and wind were considered. [AARO]aaro.milGo Fast Case ResolutionAARO GoFast Case ResolutionFebruary 24, 2025 — 6 Feb 2025 — Object Altitude (reported): Near ocean's surface. Object Altitude (assess…
For automated instrumented detectors, the lesson is practical: every apparent high-speed event should be processed first as a geometry problem. Before asking what propulsion system could explain a track, the system should ask whether the track can be produced by a slow object at a different range, a moving camera, wind drift, or a distant aircraft.
Why one camera cannot usually measure distance
A single camera measures angles. It can say that an object appeared at a certain azimuth and elevation at a certain time, and it can measure how that apparent position changed from frame to frame. But unless the object has a known size, known altitude, known brightness behaviour, reliable focus information, or a separate range measurement, the camera cannot uniquely determine distance.
This creates a family of possible solutions rather than one answer. A small object nearby and a large object far away can occupy the same number of pixels. A slow object nearby and a fast object far away can show a similar angular rate. A camera may record the line of sight accurately while still leaving the object’s true path unresolved.
That ambiguity is especially severe in skywatching because many normal reference cues are missing. The sky has no ruler. Clouds may be at uncertain altitude. The sea surface can look close beneath a target even when the target is thousands of feet above it. Infrared glare can make objects appear larger than their physical outline. Digital zoom, stabilisation, compression and sensor overlays can also mislead a viewer about the object’s true motion or size.
NASA’s UAP report therefore places unusual emphasis on calibration, metadata and multiple measurements, not merely on collecting more clips. Calibrated instruments and contextual metadata are needed so that later analysts know what the sensor was doing, where it was pointing, and how its measurements should be interpreted. [Wikisource]en.wikisource.orgResponses to Statement of TaskResponses to Statement of Task
This is the difference between a video archive and a measurement system. A video archive can preserve mystery. A measurement system can reduce it.
Impossible speed claims often hide uncertain assumptions
When a report says an object made an impossible turn or moved at impossible speed, the most important question is: impossible under which distance assumption? If a calculation begins by assuming the object was close to the camera, near the clouds, just above the sea, or at the altitude of an aircraft without proving that range, the final speed can become a mathematical artefact.
A strong speed claim normally needs at least three things:
- Range: how far the object was from the sensor at each relevant time.
- Time-resolved bearing: accurate angular position through the sequence.
- Observer motion: the position and motion of the camera platform itself.
If any of those are missing, the result should be framed as a conditional estimate, not a demonstrated flight performance. “If the object was at this distance, it would have been travelling this fast” is very different from “the object travelled this fast”.
The same caution applies to acceleration. Acceleration claims are even more fragile because they depend on changes in velocity, so small errors in pointing, timing, range, stabilisation, or object association can be amplified. A dot that appears to “jump” may reflect sensor lock, image stabilisation, background motion, rolling shutter, compression artefacts, or a wrong distance model before it reflects an actual high-g manoeuvre.
The scientific dispute is not whether extraordinary motion is physically interesting. It is whether the observation has enough independent geometry to establish that motion. AARO’s 2024 annual report shows the institutional version of this caution: many cases remain unresolved because they lack sufficient data, while resolved cases in that reporting period were attributed to prosaic objects such as balloons, birds and uncrewed systems. [U.S. Department of War]media.defense.govU.S. Department of War(https://media.defense.gov/2024/Nov/14/2003583603/-1/-1/0/FY24-CONSOLIDATED-ANNUAL-REPORT-ON-UAP-508.PDF)

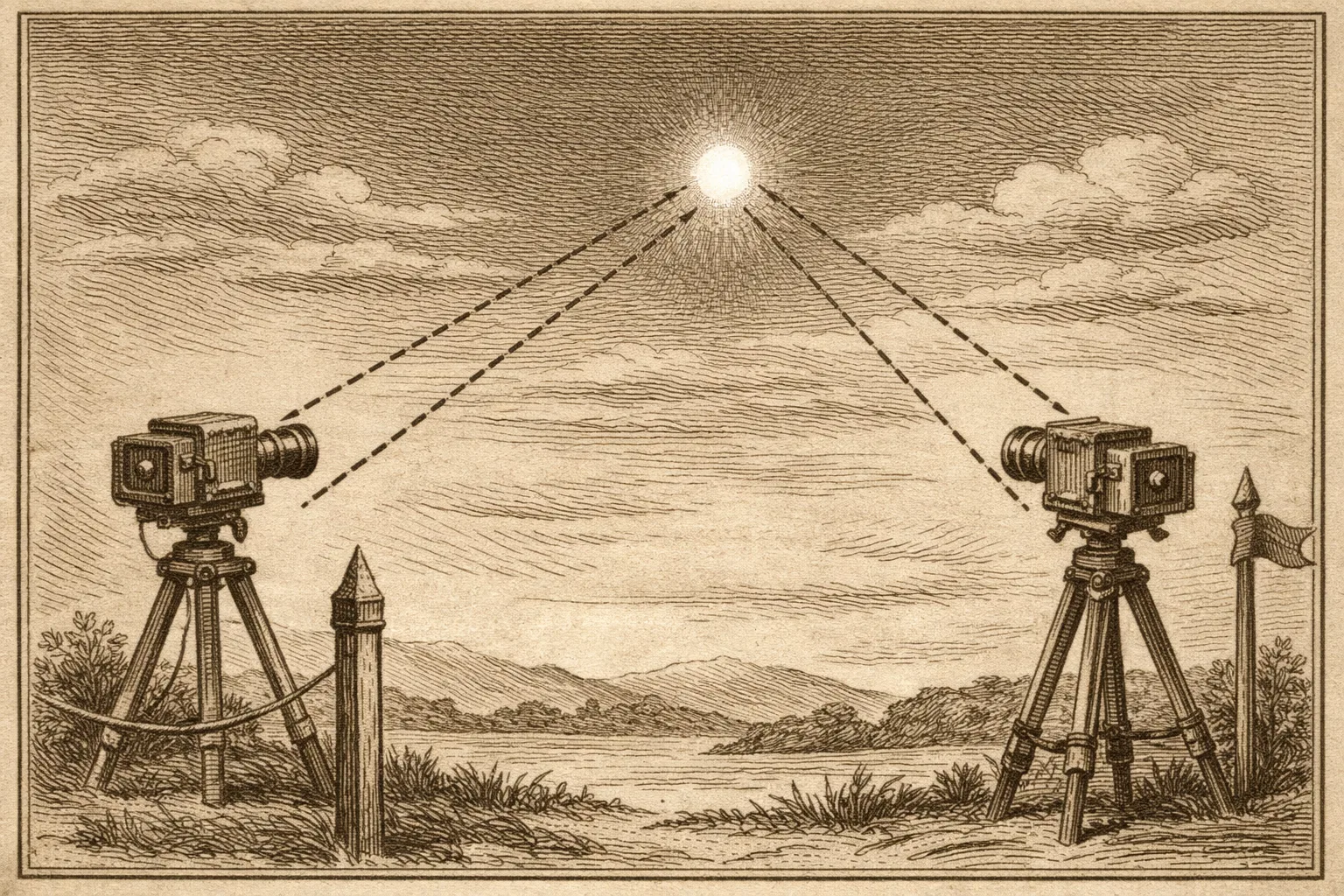
How multi-site observation changes the calculation
The simplest way to break the single-camera ambiguity is to observe the same object from more than one known location. If two separated stations see the same target at the same time, their lines of sight can be triangulated. The object is no longer merely “somewhere along this ray”; it can be placed in three-dimensional space, with uncertainty bounds.
That is why serious automated UAP detector concepts keep returning to networks, baselines and multimodal sensing. The Galileo Project’s ground-based observatory concept includes wide-field cameras for tracking and deriving positions and kinematics through triangulation, narrow-field instruments for characterisation, passive radar-style receivers, radio spectrum analysers, acoustic sensors and environmental sensors. Its stated purpose is not simply to catch unusual imagery, but to classify aerial objects by measured position, velocity and context. [galileo.hsites.harvard.edu]galileo.hsites.harvard.eduOpen source on harvard.edu.
Passive multistatic radar is another route to the same goal. A Galileo Project SkyWatch paper describes a receiver network intended to estimate three-dimensional object position and velocity using broadcast FM signals, delay, Doppler and triangulation. In principle, that kind of system directly attacks the range problem that makes optical-only speed claims so weak. [arXiv]arxiv.orgOpen source on arxiv.org.
There is also an older practical precedent in the Hessdalen Automatic Measurement Station in Norway. Its second system used two colour cameras mounted 171 metres apart so that, when a light appeared in both, the system could calculate distance and write that value onto the images. [old.hessdalen.org]old.hessdalen.orgAutomatic Measurement Station (AMSAutomatic Measurement Station (AMS
The baseline does not have to be enormous for nearby objects, but the required separation grows with target distance and desired precision. Two cameras a few metres apart may help reject insects and close birds. Stations hundreds of metres apart may help with local aerial objects. Wider networks or radar may be needed for high-altitude aircraft, balloons, satellites, or distant luminous events. The design question is not “can we see it?” but “can we locate it well enough to calculate motion?”
What automated detectors should record before claiming speed
A detector that flags “anomalous speed” without showing its range solution is not doing enough. The useful standard is not whether an object looks strange in a clip, but whether another analyst can reconstruct the geometry.
For parallax-resistant analysis, an automated UAP station should preserve:
- Precise timing: frame timestamps synchronised closely enough to compare stations.
- Camera calibration: lens model, field of view, distortion correction, zoom state and focus state.
- Pointing data: azimuth, elevation, mount position and any stabilisation or pan-tilt commands.
- Platform state: whether the sensor was fixed, hand-held, vehicle-mounted, airborne, or moving.
- Environmental context: wind profiles, cloud layers, visibility, temperature and pressure where relevant.
- Known-object context: aircraft transponder data, satellite predictions, drone activity, birds, balloons and weather phenomena.
- Raw or minimally processed data: so later analysis is not limited by compression, cropping, sharpening, overlays, or social-media copies.
- Multi-station correlation: matched detections from separated instruments where possible.
This is why open sky-observation networks and observatory-style projects matter more than individual viral clips. Sky360, for example, describes itself as an open-source global sky-observation network using AI-powered tracking stations to detect, track, identify and analyse aerial phenomena. Its value, if the network matures, would lie in repeatable station geometry and shared data standards rather than in any single spectacular recording. [Sky360]sky360.orgOpen source on sky360.org.
The same principle appears in newer Galileo Project system work, which frames the problem as one of comprehensive, calibrated, transparent data capture with provenance management. In plain terms: keep enough information that the event can be remeasured, not merely rewatched. [arXiv]arxiv.orgarXiv Galileo Project Observatory Class System ArchitecturearXiv Galileo Project Observatory Class System Architecture

The right scepticism is geometric, not dismissive
Parallax is sometimes used too casually, as if naming it automatically explains every UAP report. That is not good analysis. Some cases may remain unresolved after parallax, aircraft, balloons, birds, satellites, sensor artefacts and weather are considered. Others may have witness testimony, radar tracks, or classified sensor data not visible in public clips. A fair assessment should not pretend that every report has been solved.
But the reverse error is more common in public speed claims: treating a striking angular motion as if it were a measured physical velocity. That leap is especially risky when the clip comes from a single camera, when the range is not measured, when the observer is moving, or when the object is seen against a misleading background.
A better rule for automated instrumented UFO detectors is simple: no range, no speed claim. A single-camera clip may justify “unidentified object observed along this line of sight”. It may justify “apparent angular rate was high”. It may even justify “under this assumed distance, the implied speed would be extraordinary”. But it does not, by itself, prove impossible motion.
The strongest future systems will not be the ones that produce the most dramatic videos. They will be the ones that make dramatic videos less ambiguous: multiple stations, calibrated cameras, synchronised clocks, known baselines, radar or other range-capable sensors, environmental data and transparent reconstruction. That is how a UAP detector moves from astonishment to measurement — and how many impossible-speed claims can be tested before they become folklore.
Amazon book picks
Further Reading
Books and field guides related to Why UAP Speed Can Look Impossible. Use these as the next step if you want deeper reading beyond the article.
Practical Astronomy with Your Calculator Or Spreadsheet
Explains parallax and positional calculations.
eBay marketplace picks
Marketplace Samples
Live-tested eBay searches with available results related to this page.



Endnotes
-
Source: science.nasa.gov
Link: https://science.nasa.gov/wp-content/uploads/2023/09/uap-independent-study-team-final-report.pdfSource snippet
NASA ScienceIndependent Study Team ReportThe study of Unidentified Anomalous Phenomena (UAP) presents a unique scientific opportunity tha...
-
Source: nasa.gov
Title: update nasa shares uap independent study report names director
Link: https://www.nasa.gov/news-release/update-nasa-shares-uap-independent-study-report-names-director/Source snippet
UPDATE: NASA Shares UAP Independent Study Report14 Sept 2023 — We found that NASA can help the whole-of-government UAP effort through...
-
Source: aaro.mil
Title: Effect of Forced Perspective and Parallax View on UAP
Link: https://www.aaro.mil/Portals/136/PDFs/Information%20Papers/AARO_Effect_of_Forced_Perspective_and_Parallax_View_on_UAP_Observations_2024.pdfSource snippet
Effect of Forced Perspective and Parallax View on UAP...May 8, 2024 — the effects of forced perspective and parallax can frequently...
Published: May 8, 2024
-
Source: aaro.mil
Title: Go Fast Case Resolution
Link: https://www.aaro.mil/Portals/136/PDFs/case_resolution_reports/AARO_GoFast_Case_Resolution_Card_Methodology_Final.pdfSource snippet
AARO GoFast Case ResolutionFebruary 24, 2025 — 6 Feb 2025 — Object Altitude (reported): Near ocean's surface. Object Altitude (assess...
Published: February 24, 2025
-
Source: defensescoop.com
Title: Defense Scoop Pentagon’s UAP office reviews findings on Go Fast, Puerto
Link: https://defensescoop.com/2024/11/19/uap-aaro-findings-go-fast-puerto-rico-mt-etna-objects/ -
Source: aaro.mil
Link: https://www.aaro.mil/UAP-Cases/Official-UAP-Imagery/ -
Source: en.wikisource.org
Title: Responses to Statement of Task
Link: https://en.wikisource.org/wiki/NASA_Unidentified_Anomalous_Phenomena%3A_Independent_Study_Team_Report/Responses_to_Statement_of_Task -
Source: media.defense.gov
Title: U.S. Department of War
Link: https://media.defense.gov/2024/Nov/14/2003583603/-1/-1/0/FY24-CONSOLIDATED-ANNUAL-REPORT-ON-UAP-508.PDF -
Source: galileo.hsites.harvard.edu
Link: https://galileo.hsites.harvard.edu/publications/scientific-investigation-unidentified-aerial-phenomena-uap-using-multimodal -
Source: arxiv.org
Link: https://arxiv.org/abs/2305.18566 -
Source: arxiv.org
Link: https://arxiv.org/abs/2305.18562 -
Source: old.hessdalen.org
Title: Automatic Measurement Station (AMS)
Link: https://old.hessdalen.org/station/second.shtml -
Source: old.hessdalen.org
Title: Project Hessdalen
Link: https://old.hessdalen.org/station/ -
Source: sky360.org
Link: https://www.sky360.org/ -
Source: arxiv.org
Title: arXiv Galileo Project Observatory Class System Architecture
Link: https://arxiv.org/abs/2506.00125 -
Source: aaro.mil
Link: https://www.aaro.mil/ -
Source: science.nasa.gov
Link: https://science.nasa.gov/uap/ -
Source: en.wikisource.org
Title: Page:UAP Independent Study Team Final Report
Link: https://en.wikisource.org/wiki/Page%3AUAP_Independent_Study_Team_-_Final_Report.pdf/5 -
Source: arxiv.org
Link: https://arxiv.org/html/2411.02401v1 -
Source: arxiv.org
Link: https://arxiv.org/pdf/2305.18566 -
Source: arxiv.org
Link: https://arxiv.org/html/2506.00125v1 -
Source: arxiv.org
Link: https://arxiv.org/html/2312.00558v3 -
Source: aaro.ca
Link: https://www.aaro.ca/ -
Source: space.com
Title: pentagon ufo office aaro historical report no emprical evidence alien technology
Link: https://www.space.com/pentagon-ufo-office-aaro-historical-report-no-emprical-evidence-alien-technology -
Source: space.com
Title: pentagon ufo chief tells senate very anomalous objects need careful study video
Link: https://www.space.com/space-exploration/search-for-life/pentagon-ufo-chief-tells-senate-very-anomalous-objects-need-careful-study-video -
Source: aaro.org
Link: https://aaro.org/ -
Source: galileo.hsites.harvard.edu
Link: https://galileo.hsites.harvard.edu/activities -
Source: galileo.hsites.harvard.edu
Link: https://galileo.hsites.harvard.edu/FAQ -
Source: aaro.com
Title: Your Partner in Group Reporting | CPM software & more
Link: https://aaro.com/en/ -
Source: navair.navy.mil
Title: mil Documents | NAVAIR
Link: https://www.navair.navy.mil/foia/documents -
Source: defensescoop.com
Title: uap aaro chief unveils pentagon annual caseload analysis new efforts
Link: https://defensescoop.com/2024/11/14/uap-aaro-chief-unveils-pentagon-annual-caseload-analysis-new-efforts/ -
Source: media.defense.gov
Title: DOPSR 2024 0263 AARO HISTORICAL RECORD REPORT VOLUME 1 2024
Link: https://media.defense.gov/2024/Mar/08/2003409233/-1/-1/0/DOPSR-2024-0263-AARO-HISTORICAL-RECORD-REPORT-VOLUME-1-2024.PDF -
Source: dvidshub.net
Link: https://www.dvidshub.net/video/988676/pr-018-unresolved-uap-report-europe-2024
Additional References
-
Source: youtube.com
Title: Quantum physicists analyze pentagon US navy UFO video footage
Link: https://www.youtube.com/watch?v=cwACSrLEPeMSource snippet
SOMETHING IS HAPPENING — We Are Detecting Anomalous Objects | What They Don't Explain...
-
Source: youtube.com
Title: The SHOCKING Math Error Behind Viral UFO Videos | Mick West
Link: https://www.youtube.com/watch?v=ypfbhfEXnBoSource snippet
How scientists use math to help explain UFO videos...
-
Source: youtube.com
Title: Breakdown of the Pentagon UFO videos with Mick West
Link: https://www.youtube.com/watch?v=Le7Fqbsrrm8Source snippet
Quantum physicists analyze pentagon US navy UFO video footage...
-
Source: youtube.com
Title: How scientists use math to help explain UFO videos
Link: https://www.youtube.com/watch?v=diPXow8zgc8Source snippet
Breakdown of the Pentagon UFO videos with Mick West...
-
Source: researchgate.net
Link: https://www.researchgate.net/publication/371163445_The_Scientific_Investigation_of_Unidentified_Aerial_Phenomena_UAP_Using_Multimodal_Ground-Based_Observatories -
Source: pbs.org
Link: https://www.pbs.org/newshour/science/3-ways-scientists-use-math-to-help-debunk-ufo-videos -
Source: facebook.com
Link: https://www.facebook.com/wired/posts/a-pentagon-report-released-to-congress-confirms-the-reality-of-videos-involving-/10158502963443721/ -
Source: aui.edu
Link: https://aui.edu/aaro-releases-report-on-unidentified-anomalous-phenomena-uap/ -
Source: reddit.com
Link: https://www.reddit.com/r/UFOs/comments/1gv8xak/aaro_has_resolved_the_go_fast_uap/ -
Source: reddit.com
Link: https://www.reddit.com/r/HighStrangeness/comments/10aa9mt/aaro_the_us_government_anomalous_phenomena/
Topic Tree