Within ADS B
How Aircraft Tracks Land in Video
Matching aircraft to video means turning reported positions into image locations, not just checking a separate flight map.
On this page
- Camera position, orientation and field of view
- Turning aircraft coordinates into image pixels
- Scoring time, direction and image position matches
Page outline Jump by section
Introduction
Matching a reported aircraft to a light or object in a video requires more than displaying a flight-tracking map alongside the footage. An automated instrumented UAP detector must determine whether a specific aircraft should appear at a particular location in a particular video frame. That requires projecting the aircraft’s reported three-dimensional position into the camera’s two-dimensional image using the camera’s location, orientation and optical characteristics. When this projection is accurate, the system can test whether a detection coincides with known air traffic or remains unexplained. When it is inaccurate, genuine aircraft may appear to be unrelated objects or anomalous motion may simply reflect calibration errors rather than anything unusual. [MDPI]mdpi.comMDPICommissioning an All-Sky Infrared Camera Array for …by L Domine · 2025 · Cited by 11 — If the camera captures N images of an aircra…

Camera Position, Orientation and Field of View
Projection begins with a calibrated camera rather than with aircraft data. [youtube.com]youtube.comCamera Calibration with MATLABOPENCV & C++ TUTORIALS - 214 | Camera Calibration | projectPoints - YouTube OPENCV & C++ TUTORIALS - 214 | Camera Calibration | project…
Three groups of parameters define how the camera sees the sky:
- Position: the camera’s latitude, longitude and height above sea level, usually measured with GPS or survey methods.
- Orientation: the direction the camera is pointing, expressed as azimuth, elevation and roll, or equivalently as a three-dimensional rotation matrix.
- Optical characteristics: focal length, sensor dimensions, principal point and lens distortion, which determine how incoming light rays map onto pixels. [docs.adaptive-vision.com]docs.adaptive-vision.comCamera Calibration and World CoordinatesCamera calibration, also known as camera resectioning, is a process of estimating parameters of a…
These are commonly separated into intrinsic and extrinsic calibration. Intrinsic calibration describes the camera itself, while extrinsic calibration describes where the camera sits and how it is rotated relative to the surrounding world. Both are required before a world position can be transformed into a predicted image position. [Wikipedia]WikipediaCamera resectioningCamera resectioning
Wide-angle and fisheye lenses, which are common in all-sky observatories, make calibration especially important because straight-line perspective assumptions become increasingly inaccurate near the edge of the image unless lens distortion is explicitly modelled. Modern calibration approaches therefore include distortion models tailored to wide-angle optics rather than relying solely on the ideal pinhole camera approximation. [arXiv]arxiv.orgarXiv Geometric Wide-Angle Camera Calibration: A Review and Comparative StudyGeometric Wide-Angle Camera Calibration: A Review and Comparative StudyJune 15, 2023…

Turning Aircraft Coordinates into Image Pixels
ADS-B reports provide aircraft positions in geographic coordinates together with altitude and timestamps. These must first be converted into a common three-dimensional coordinate system relative to the observing camera.
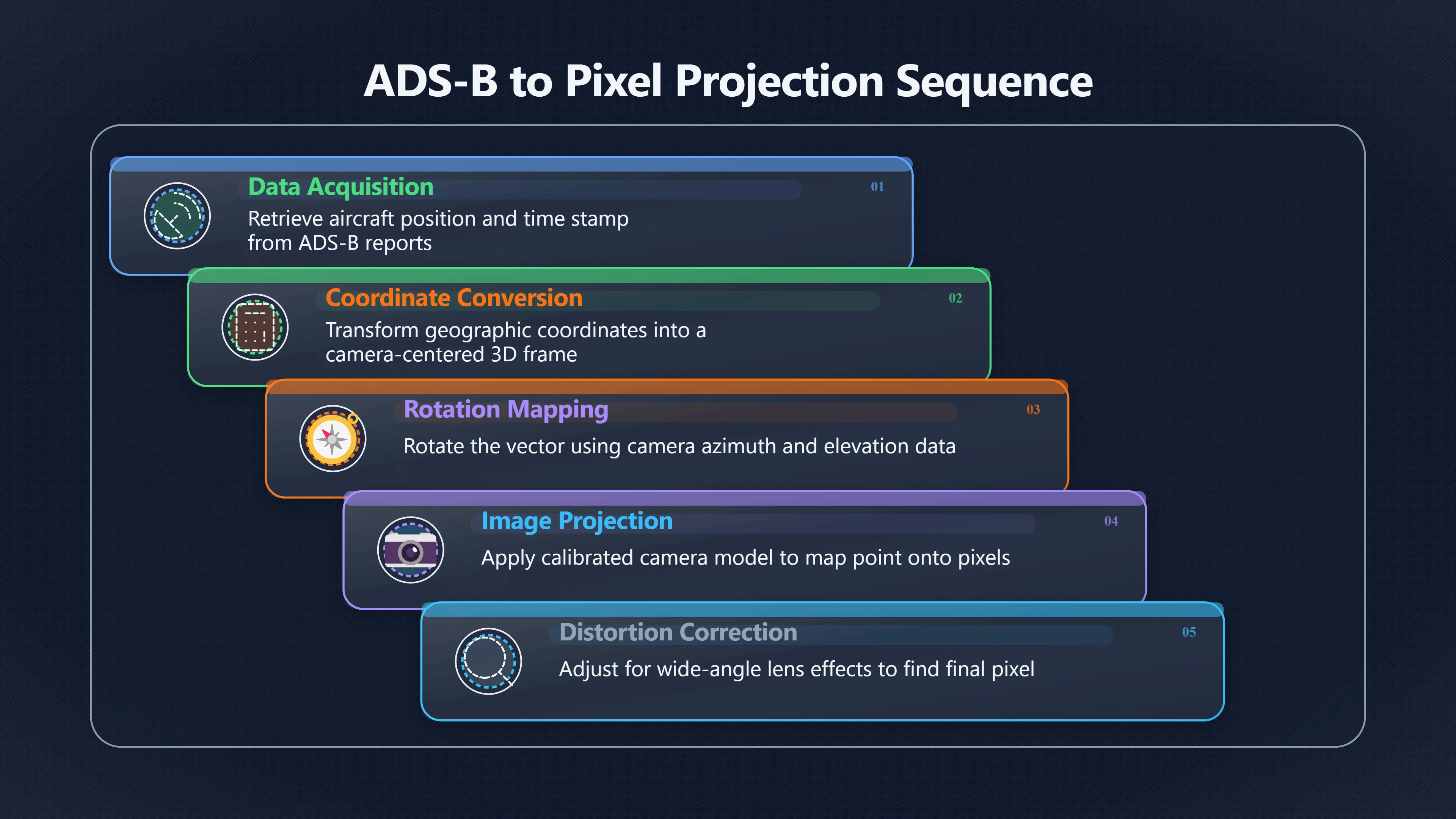
The projection process is conceptually straightforward:

- Obtain the aircraft’s reported position at the video timestamp.
- Convert that position into a local three-dimensional coordinate frame centred on the camera.
- Rotate the vector into the camera’s coordinate system using the camera orientation.
- Apply the calibrated camera model to project the three-dimensional point onto the image plane.
- Correct for lens distortion to predict the final pixel location. MDPI+2Wikipedia
The important point is that the result is not merely a compass bearing or elevation angle. The software predicts an actual pixel position—for example, that an aircraft should appear near pixel (1420, 610) in a particular frame. The predicted location can then be compared directly with detections produced by computer vision algorithms.
If the aircraft lies outside the camera’s field of view, projects below the horizon or falls behind an obstruction, the system can reject it immediately as an explanation for that particular detection. Likewise, if the predicted position agrees closely with the detected object over many consecutive frames, the aircraft becomes a strong candidate for identification. MDPI
Using Aircraft as Calibration Targets
A particularly useful feature of automated UAP observatories is that aircraft are not merely objects to eliminate—they are also moving calibration references.
The Galileo Project has described using ADS-B-equipped aircraft to determine camera orientation by matching aircraft image positions with their known three-dimensional trajectories. As an aircraft traverses the sky, multiple image measurements become available, producing a sequence of corresponding world coordinates and pixel locations. These correspondences allow estimation of the camera’s pose using the well-established Perspective-n-Point (PnP) method implemented in computer vision libraries such as OpenCV. MDPI
This approach has several practical advantages:
- it avoids relying solely on stars, which may not be visible in daylight or thermal imagery;
- it continuously checks whether camera orientation has drifted;
- it allows infrared cameras to be calibrated using the same aircraft observed in visible-light systems;
- it provides an objective test of whether the geometric model remains accurate over time. MDPI
Instead of treating commercial aircraft as unwanted clutter, the detector uses them as known moving landmarks that continually validate the observing system.
Scoring Time, Direction and Image-Position Matches
Projection alone does not identify an aircraft. Automated systems normally combine several independent agreement tests before assigning a match.
A robust scoring process typically evaluates:
- Time agreement: the projected aircraft position should correspond to the correct video frame after accounting for any clock offsets.
- Image-position agreement: the projected pixel location should lie close to the detected object.
- Direction agreement: apparent motion across the image should match the projected aircraft trajectory.
- Velocity consistency: frame-to-frame movement should be compatible with the aircraft’s reported speed and geometry.
- Persistence: agreement should continue over many frames rather than occurring by chance in a single image. MDPI
Combining these criteria is substantially stronger than simply asking whether an aircraft was somewhere nearby according to an online flight tracker. Two aircraft may occupy similar compass directions, yet only one follows the correct image path through the camera’s field of view.
Amazon book picks
Further Reading
Books and field guides related to How Aircraft Tracks Land in Video. Use these as the next step if you want deeper reading beyond the article.

Digital Image Processing, Global Edition
First published 2018. Subjects: Image processing, digital techniques.
Multiple view geometry in computer vision
First published 2000. Subjects: Computer vision, Projective Geometry, Geometry, modern.
Learning OpenCV
First published 2008. Subjects: OpenCV, Computer vision, Image processing, Human-computer interaction, Bildbehandling.
Computer Vision
First published 2010. Subjects: Computer algorithms, Bildverarbeitung, Computer vision, Image processing, Maschinelles Sehen.
eBay marketplace picks
Marketplace Samples
Example marketplace items related to this page. Use the search link to explore similar finds on eBay.


Sources of Projection Error
Even with accurate ADS-B data, projection can fail if the observing geometry is wrong.
Common error sources include:
- inaccurate camera orientation after installation or maintenance;
- incorrect focal length or field-of-view estimates;
- imperfect lens distortion correction, especially for fisheye optics;
- clock drift between the camera and ADS-B receiver;
- interpolation errors when ADS-B updates are less frequent than video frames;
- GPS position uncertainty for either the aircraft or the observing station. MDPI+2docs.adaptive-vision.com
Many of these errors produce systematic offsets. For example, every projected aircraft may appear consistently several pixels to one side of its observed location, indicating that the camera orientation requires refinement rather than suggesting anomalous behaviour.
Why Projection Matters for Automated UAP Detection
A flight map answers the question, “Was an aircraft in the area?” Projection answers the more demanding question, “Should this aircraft appear exactly here in this frame?”
That distinction is critical for automated instrumented UAP detectors. A convincing association requires agreement in geometry, timing and image position simultaneously. Conversely, when repeated projection shows that known aircraft consistently fail to account for a detected object despite accurate calibration and synchronised timing, the event becomes a stronger candidate for further investigation rather than immediate dismissal. By integrating calibrated camera models with ADS-B trajectories, automated observatories move from simple proximity checks to quantitative, frame-by-frame geometric testing. MDPI
Endnotes
-
Source: docs.adaptive-vision.com
Link: https://docs.adaptive-vision.com/5.1/studio/machine_vision_guide/CameraCalibrationAndWorldCoordinates.htmlSource snippet
Camera Calibration and World CoordinatesCamera calibration, also known as camera resectioning, is a process of estimating parameters of a...
-
Source: Wikipedia
Title: Camera resectioning
Link: https://en.wikipedia.org/wiki/Camera_resectioning -
Source: arxiv.org
Title: arXiv Geometric Wide-Angle Camera Calibration: A [Review]({{ ‘review/’ | relative_url }}) and Comparative Study
Link: https://arxiv.org/abs/2306.09014Source snippet
Geometric Wide-Angle Camera Calibration: A Review and Comparative StudyJune 15, 2023...
Published: June 15, 2023
-
Source: Wikipedia
Title: Pinhole camera model
Link: https://en.wikipedia.org/wiki/Pinhole_camera_model -
Source: Wikipedia
Link: https://en.wikipedia.org/wiki/Perspective-n-Point
Additional References
-
Source: worldscientific.com
Link: https://www.worldscientific.com/doi/pdf/10.1142/S2251171723400020?download=true&srsltid=AfmBOorzmjzR53J9N1L_7bwHEeJukrPxYpzFvoxuRmiAnwhJsFxYwwm5Source snippet
A Hardware and Software Platform for Aerial Object...The camera-to-be-calibrated will capture N images of the airplane, associating with...
-
Source: avi-loeb.medium.com
Link: https://avi-loeb.medium.com/commissioning-data-on-half-a-million-objects-in-the-sky-from-the-galileo-project-observatory-are-a23bd084233aSource snippet
Data on Half a Million Objects in the Sky from...Using an automatically generated data set derived from ADS-B-data, a dataset of synthet...
-
Source: e-consystems.com
Title: a comprehensive guide to understand camera projection and parameters
Link: https://www.e-consystems.com/blog/camera/technology/a-comprehensive-guide-to-understand-camera-projection-and-parameters/Source snippet
A Comprehensive Guide to Understand Camera Projection...29 Jan 2025 — In this blog, you'll get expert insights into these concepts as we...
-
Source: researchgate.net
Link: https://www.researchgate.net/post/Can_we_find_the_projection_of_a_pixel_on_the_ground_plane_in_image_from_a_calibrated_cameraSource snippet
The image contains a table with known corner coordinates (image coordinate...
-
Source: robots.ox.ac.uk
Link: https://www.robots.ox.ac.uk/~cmei/articles/2009_IROS_VisualTracking_Salazar.pdfSource snippet
Tracking of Planes with an Uncalibrated Central...by A Salazar-Garibay · Cited by 14 — In this paper, we have shown how to efficiently t...
-
Source: youtube.com
Title: Mapping the 3D World to an Image
Link: https://www.youtube.com/watch?v=nRVuLFQ_BngSource snippet
5 Minutes with CyrillMapping 3D points to 2D pixel locations explained in 5 minutes Series: 5 Minutes with Cyrill Cyrill Stachniss, 2021...
-
Source: youtube.com
Title: Camera Calibration with MATLAB
Link: https://www.youtube.com/watch?v=x6YIwoQBBxASource snippet
OPENCV & C++ TUTORIALS - 214 | Camera Calibration | projectPoints - YouTube OPENCV & C++ TUTORIALS - 214 | Camera Calibration | project...
-
Source: doc.ic.ac.uk
Title: ic.ac.uk Robotics
Link: https://www.doc.ic.ac.uk/~ajd/Robotics/RoboticsResources/lecture7.pdfSource snippet
Department of ComputingA perspective camera projects a 3D point at vector cC to image coordinates (u, v) via the camera calibration matri...
-
Source: youtube.com
Title: [Open Source]({{ ‘open-source/’ | relative_url }}) Astronomy
Link: https://www.youtube.com/watch?v=rf1cyFFtYLsSource snippet
Camera Intrinsic and Extrinsic Parameters, Camera Calibration...
-
Source: youtube.com
Title: Ceiling Projection Mapping of Planes Using ADS-B
Link: https://www.youtube.com/watch?v=k-N6mFycM_8Source snippet
Open Source Astronomy - Sky360 Automated Sky Monitoring...
Topic Tree