Within ADS B
The Airliners That Test UAP Detectors
Ordinary aircraft provide repeatable targets for measuring whether a UAP detector sees and explains the sky it already understands.
On this page
- Why known traffic makes useful benchmark targets
- Detection efficiency, weather and camera uptime
- Separating missed detections from unexplained events
Page outline Jump by section
Introduction
Known aircraft are one of the most valuable calibration tools available to an automated instrumented UAP detector. Unlike genuinely unexplained events, commercial airliners, business jets and many other aircraft provide independently measured positions through Automatic Dependent Surveillance–Broadcast (ADS-B) together with predictable motion across the sky. That allows researchers to measure whether a detection system correctly finds, identifies and tracks objects whose locations are already known. Rather than treating aircraft simply as false positives to discard, modern UAP observatories increasingly use them as benchmark targets to quantify camera alignment, detection efficiency, environmental limitations and overall system health. This approach helps distinguish failures of the instrument from genuinely unexplained detections and provides the baseline evidence that scientific investigations require. [MDPI]mdpi.comThe rotation matrix and translation vector which convert a camera's coordinate frame to world…Read more…

Why known traffic makes useful benchmark targets
A detector cannot meaningfully claim to recognise unusual aerial events until it demonstrates reliable performance on ordinary ones. Aircraft offer several advantages as calibration targets:
- Their positions, altitudes and trajectories are independently measured and time-stamped.
- Thousands of examples become available over weeks or months without arranging dedicated test flights.
- Aircraft appear across a wide range of distances, headings, altitudes and weather conditions.
- They produce realistic infrared, optical and motion signatures that resemble many objects likely to trigger automated detectors.
This makes scheduled air traffic analogous to a reference dataset in machine learning. Every overflight becomes another opportunity to ask whether the detector successfully observed an object that should have been visible, whether it estimated its position correctly, and whether the software classified it consistently.
The Galileo Project’s all-sky infrared observatory illustrates this philosophy. Instead of relying solely on laboratory calibration, the system continuously compares observed aircraft against ADS-B tracks to evaluate real-world performance under operational conditions. [MDPI]mdpi.comThe rotation matrix and translation vector which convert a camera's coordinate frame to world…Read more…
Detection efficiency, weather and camera uptime
Aircraft benchmarks reveal much more than whether an object was detected. They expose the practical limits of the entire observing system.
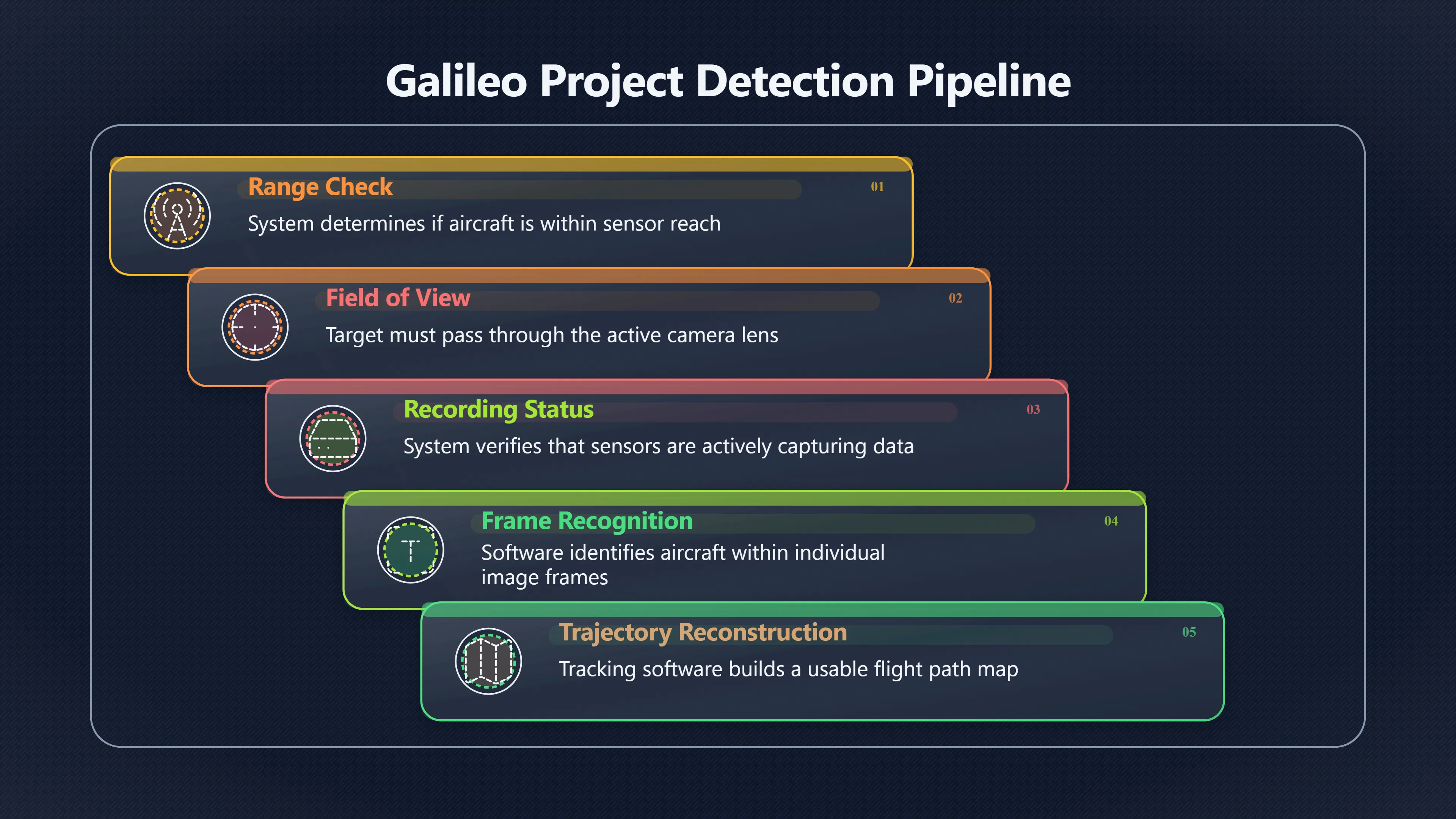
Researchers distinguish several stages before an aircraft can become a successful detection:
- The aircraft must be within range.
- It must pass through the effective field of view.
- The camera must actually be recording.
- The detection software must recognise it in individual frames.
- The tracking software must reconstruct a usable trajectory.
Measuring each stage separately prevents all failures from being lumped together into a single “missed detection” statistic.
During commissioning of the Galileo Project’s infrared camera array, researchers used ADS-B-equipped aircraft to establish quantitative baseline performance. Over five months they found:
- An acceptance rate of about 41%, meaning roughly two-fifths of ADS-B aircraft that passed through the effective field of view while satisfying recording conditions were successfully captured by the observing system.
- A mean frame-by-frame aircraft detection efficiency of approximately 36% for recorded aircraft.
- Strong dependence of detection efficiency on atmospheric visibility, aircraft size and range.
Rather than viewing these figures as disappointing, they establish a measurable operating envelope. If detection efficiency falls unexpectedly during later observations, investigators can determine whether changing weather, camera faults or software regressions are responsible instead of attributing missing detections to unexplained phenomena. [hou.usra.edu]hou.usra.eduCOMMISSIONIN G OF AN ALL-SKY INFRARED CAMERACOMMISSIONING OF AN ALL-SKY INFRARED CAMERA…January 7, 2025 — We find an acceptance rate (fraction of airplanes passing in the effecti…
Equally important is camera uptime. A detector cannot explain an event that occurred while sensors were offline, saturated or temporarily obstructed. Recording statistics alongside aircraft benchmarks therefore allows researchers to distinguish instrument availability from detection capability.

Aircraft as calibration targets instead of mere exclusions
Known aircraft also help calibrate the instrument itself.
Visible-light astronomical cameras can often use stars to determine pointing direction. Long-wave infrared cameras cannot always do this because stars are generally too faint at those wavelengths. The Galileo Project therefore developed an alternative approach that uses ADS-B-equipped aircraft as moving calibration references.
For each aircraft passage, the system associates image pixels with independently measured three-dimensional aircraft positions and applies a Perspective-n-Point solution to determine the camera’s orientation. Repeating this process over many aircraft enables continuous monitoring of changes caused by wind loading, thermal expansion or maintenance work. [MDPI]mdpi.comThe rotation matrix and translation vector which convert a camera's coordinate frame to world…Read more…
This turns ordinary airline traffic into a continuously refreshed calibration source. Instead of requiring special calibration sessions, the detector automatically checks whether its estimate of where each camera is pointing remains accurate throughout normal operation.
Separating missed detections from unexplained events
One of the biggest methodological benefits of aircraft benchmarking is that it separates different kinds of uncertainty.
If an aircraft appears in ADS-B data but is absent from camera detections, investigators can examine whether:
- weather reduced visibility;
- the aircraft was too distant or too small;
- recording stopped temporarily;
- the detection algorithm failed;
- timing or calibration errors prevented a correct match.
These are fundamentally different from cases where an object is clearly detected but has no corresponding ADS-B aircraft.
Likewise, an object lacking an ADS-B match should not automatically be considered anomalous. General aviation aircraft, military operations, gliders, older aircraft, reception gaps or incomplete coverage can all produce legitimate non-matches. Aircraft benchmarking therefore reduces both false positives and false confidence by showing exactly what the detector successfully measures and where its blind spots remain. [MDPI]mdpi.comThe rotation matrix and translation vector which convert a camera's coordinate frame to world…Read more…
Benchmark datasets improve statistical confidence
Large collections of known aircraft produce something that anecdotal UAP reports rarely provide: statistically meaningful performance data.
Instead of evaluating one dramatic incident, researchers can analyse thousands of routine overflights to estimate quantities such as:
- detection probability versus distance;
- detection probability versus atmospheric visibility;
- sensitivity to aircraft size;
- trajectory reconstruction accuracy;
- false detection rates;
- calibration stability over weeks or months.
These measurements establish confidence intervals for detector performance. Later candidate anomalies can then be interpreted relative to a quantified baseline rather than subjective expectations.
The same commissioning work reconstructed roughly 500,000 aerial trajectories during five months of operation. Most represented ordinary airborne objects. Automated outlier analysis initially flagged many trajectories, but manual review reduced the genuinely ambiguous set dramatically, illustrating how benchmark datasets help distinguish algorithmic outliers from potentially interesting cases requiring additional sensors or distance measurements. [arXiv]arxiv.orgOpen source on arxiv.org.

Why benchmark performance matters before claiming anomalies
NASA’s independent UAP study emphasised that progress depends on calibrated sensors, complete metadata, multiple measurements and well-characterised baseline data. Aircraft benchmarking directly addresses those requirements because it measures what the system should already understand before asking it to identify anything unusual. [NASA Science]science.nasa.govNASA ScienceIndependent Study Team ReportAt present, analysis of UAP data is hampered by poor sensor calibration, the lack of multiple me…
For automated instrumented UAP detectors, the most persuasive evidence is therefore not an isolated unexplained detection but a documented history showing that the observatory consistently detects ordinary aircraft under known conditions, quantifies when and why it misses them, and continuously validates its own calibration. Only against that measured baseline can an unexplained observation be evaluated as a potential anomaly rather than an artefact of the observing system.
Amazon book picks
Further Reading
Books and field guides related to The Airliners That Test UAP Detectors. Use these as the next step if you want deeper reading beyond the article.
Introduction to Flight
Provides a solid grounding in aircraft performance, flight characteristics, and operational concepts useful for understanding known aircr...
Skunk Works
Offers valuable context on aircraft detection, testing, and aerospace engineering culture relevant to instrumented observation.
Understanding GPS/GNSS
First published 2017. Subjects: Global Positioning System, TECHNOLOGY & ENGINEERING, Military Science.
eBay marketplace picks
Marketplace Samples
Example marketplace items related to this page. Use the search link to explore similar finds on eBay.


Endnotes
-
Source: mdpi.com
Link: https://www.mdpi.com/1424-8220/25/3/783Source snippet
The rotation matrix and translation vector which convert a camera's coordinate frame to world...Read more...
-
Source: science.nasa.gov
Link: https://science.nasa.gov/wp-content/uploads/2023/09/uap-independent-study-team-final-report.pdfSource snippet
NASA ScienceIndependent Study Team ReportAt present, analysis of UAP data is hampered by poor sensor calibration, the lack of multiple me...
-
Source: arxiv.org
Link: https://arxiv.org/abs/2411.07956 -
Source: hou.usra.edu
Title: COMMISSIONIN G OF AN ALL-SKY INFRARED CAMERA
Link: https://www.hou.usra.edu/meetings/lpsc2025/pdf/2865.pdfSource snippet
COMMISSIONING OF AN ALL-SKY INFRARED CAMERA...January 7, 2025 — We find an acceptance rate (fraction of airplanes passing in the effecti...
Published: January 7, 2025
-
Source: ui.adsabs.harvard.edu
Link: https://ui.adsabs.harvard.edu/abs/arXiv%3A2411.07956Source snippet
In addition to performing...Read more...
Additional References
-
Source: researchgate.net
Link: https://www.researchgate.net/publication/388466760_Commissioning_an_All-Sky_Infrared_Camera_Array_for_Detection_of_Airborne_ObjectsSource snippet
(PDF) Commissioning an All-Sky Infrared Camera Array for...10 Jan 2025 — In addition to performing intrinsic and thermal calibrations, w...
-
Source: thedebrief.org
Link: https://thedebrief.org/nasas-unidentified-anomalous-phenomena-report-key-takeaways/Source snippet
NASA's Unidentified Anomalous Phenomena Report14 Sept 2023 — “At present, analysis of UAP data is hampered by poor sensor calibration...
-
Source: en.wikisource.org
Title: Responses to Statement of Task
Link: https://en.wikisource.org/wiki/NASA_Unidentified_Anomalous_Phenomena%3A_Independent_Study_Team_Report/Responses_to_Statement_of_TaskSource snippet
Unidentified Anomalous Phenomena: Independent...14 Oct 2023 — Indeed, several apparent UAP have been demonstrated to be sensor artifacts...
-
Source: youtube.com
Link: https://www.youtube.com/watch?v=bQo08JRY0iMSource snippet
anomalous phenomena (UAPs) – that is, observations of...
-
Source: youtube.com
Title: Curious Pilot: N661LF Oregon UAP / UFO sighting explained,
Link: https://www.youtube.com/watch?v=GyXRO7MR75cSource snippet
Project Dark Track: Filtering UAP Telemetry - YouTube...
Published: December 7, 2024
-
Source: avi-loeb.medium.com
Link: https://avi-loeb.medium.com/commissioning-data-on-half-a-million-objects-in-the-sky-from-the-galileo-project-observatory-are-a23bd084233aSource snippet
Using machine learning...Read more...
-
Source: youtube.com
Title: Curious Pilot: UAP Investigation Tool
Link: https://www.youtube.com/watch?v=_mAKpAOA8NcSource snippet
Curious Pilot: N661LF Oregon UAP / UFO sighting explained, December 7, 2024...
Published: December 7, 2024
-
Source: youtube.com
Title: Project Dark Track: Filtering UAP Telemetry
Link: https://www.youtube.com/watch?v=r83GmGu0tXASource snippet
Using AI to detect strange events in the sky...
-
Source: youtube.com
Title: Using AI to detect strange events in the sky
Link: https://www.youtube.com/watch?v=nHMEfP68jqISource snippet
Curios Pilot: UAP Investigation Example...
-
Source: youtube.com
Title: Curios Pilot: UAP Investigation Example
Link: https://www.youtube.com/watch?v=CU1TRVk6yUcSource snippet
Curious Pilot: UAP Investigation Tool...
Topic Tree