Within UFODAP
When does a camera network measure distance?
UFODAP becomes more measurement-rich when separated cameras share timing, locations and target records for the same event.
On this page
- Why one camera rarely gives range
- What separated stations add
- Which records must line up across sites
Page outline Jump by section
Introduction
A single UFODAP station can detect, track and record an unusual aerial target, but it usually cannot determine how far away that target is. A bright light, aircraft, balloon or unknown object can produce similar image tracks when viewed from only one location because the camera measures direction far more easily than distance. Triangulation is the mechanism that changes this. When two or more separated UFODAP stations observe the same target and their observations can be matched in time and direction, the geometry of the observations can be used to estimate the target’s position in three-dimensional space. UFODAP’s own Mission Control software is designed around this concept and states that if two Optical Tracking Data Acquisition Units (OTDAUs) lock onto a common object, the system can triangulate the target and display estimates of location, altitude, speed and size. [UFODAP]ufodap.comDap Camera, Science and TechnologyIf two DAUs are OTDAUs and their cameras lock onto a common object, then MC can triangulate the target…
 Within the broader goal of automated instrumented UFO detectors, triangulation is important because range is often the missing measurement that prevents reliable estimates of speed, altitude and physical dimensions.
Within the broader goal of automated instrumented UFO detectors, triangulation is important because range is often the missing measurement that prevents reliable estimates of speed, altitude and physical dimensions.
Why one camera rarely gives range
An optical camera primarily records angular information. Every pixel corresponds to a direction in the sky, but not to a known distance. A distant airliner and a much smaller nearby object can occupy similar positions in a frame. Without an independent distance measurement, calculations of speed or size become highly uncertain.
This limitation is well known in computer vision and photogrammetry. Triangulation methods require observations from multiple viewpoints because a single image does not uniquely determine the position of an object in space. Standard triangulation models use the viewing geometry of at least two cameras together with the observed image coordinates of the same target. [Mrcal]mrcal.secretsauce.netMrcal Triangulation methods and uncertaintyTriangulation methods and uncertainty - mrcalEach triangulation operation takes as input Two camera models. Intrinsics (lens behavio…
For UAP investigations, this distinction is critical. Many widely circulated videos show motion relative to a camera, but without a known range there is no reliable way to convert that apparent motion into true velocity or acceleration. A solitary UFODAP station can produce a much better record than a handheld phone, yet it still faces the same fundamental distance problem.
What separated stations add
Triangulation becomes possible when two observing stations are separated by a known baseline and both record the same target. Each station provides a line of sight toward the object. The point where those sight lines intersect, or most nearly intersect after accounting for measurement error, yields an estimated position.
UFODAP explicitly incorporates this concept in its multi-station architecture. Mission Control can receive real-time data from multiple Data Acquisition Units and, when two OTDAUs lock onto the same object, calculate target location, altitude, speed and size through triangulation. [UFODAP]ufodap.comDap Camera, Science and TechnologyIf two DAUs are OTDAUs and their cameras lock onto a common object, then MC can triangulate the target…
The value of separated stations grows with baseline length. If two cameras are only a few metres apart, a distant target appears almost identical from both viewpoints. As the separation increases, the angular difference between the observations becomes easier to measure. Research sky-monitoring systems and stereovision networks similarly rely on spatially distributed cameras to estimate trajectories and positions of aerial objects. [PMC]pmc.ncbi.nlm.nih.govLong Baseline Stereovision for Automatic Detection and…by R Danescu · 2012 · Cited by 25 — This paper presents a generic, low cost…
In practical UFODAP deployments, Mission Control is recommended when cameras can be separated by enough distance to support triangulation. The system documentation specifically notes that multiple cameras located some distance apart can be used to triangulate target locations. [UFODAP]ufodap.myshopify.comOpen source on myshopify.com.
Which records must line up across sites
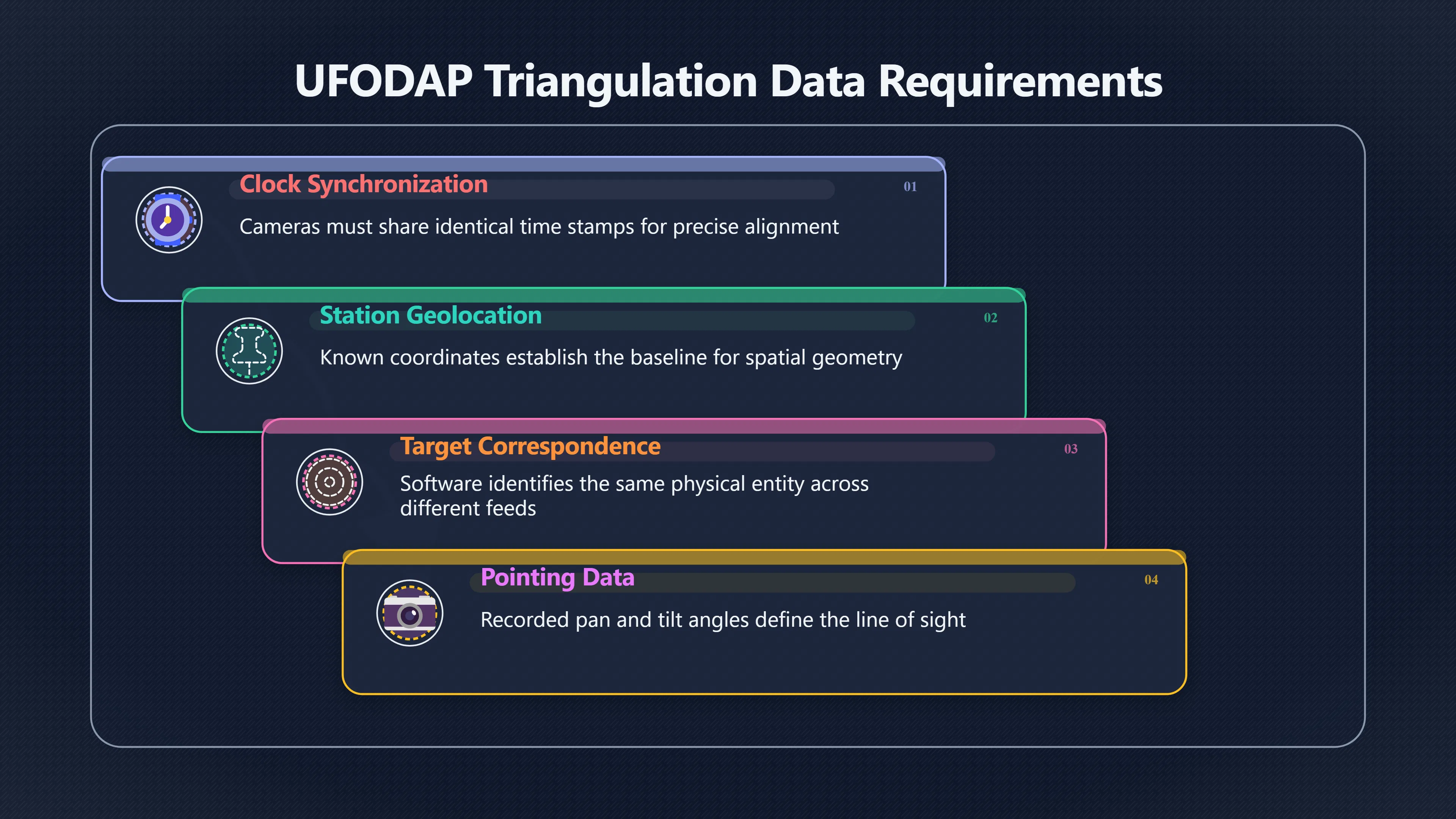
Triangulation only works when the software can establish that two stations observed the same event. Several records must align.

Accurate timing
The observations must refer to the same moment. Even a modest timing error can create a large positional error for a fast-moving target. Multi-camera tracking systems commonly depend on synchronized clocks, often through GPS timing or network synchronization methods, because position estimates degrade when cameras are not aligned in time. [World Scientific+2arXiv]worldscientific.comWorld ScientificA Hardware and Software Platform for Aerial Object…by M Szenher · 2023 · Cited by 13 — We will use the Network Time Pr…
For UFODAP, timestamps associated with detections are therefore not merely administrative metadata; they are part of the evidence needed to associate observations across stations.
Known station locations
The coordinates of each observing station must be known. Triangulation geometry depends on the baseline between observers. If the camera locations are uncertain, the calculated target position inherits that uncertainty. Mission Control’s mapping functions are built around the geolocations of participating stations. [UFODAP]ufodap.comDap Camera, Science and TechnologyIf two DAUs are OTDAUs and their cameras lock onto a common object, then MC can triangulate the target…
Common target identification
Both stations must be tracking the same object rather than different objects in the same region of sky. This sounds obvious, but it can be difficult when multiple aircraft, satellites, birds or lights are present simultaneously.
The strongest cases occur when records show matching trajectories, matching timestamps and compatible angular positions from each site. Computer-vision literature treats this as a correspondence problem: determining that observations from different cameras belong to the same physical object before triangulation is attempted. [ResearchGate]researchgate.netA Unified Approach for Multi-Object Triangulation, Tracking…Object triangulation, 3-D object tracking, feature corresponde…
Camera pointing information
Each station must know where its camera was aimed when the observation occurred. Pan-tilt-zoom tracking systems are especially useful because they continuously maintain target-centred observations, but the recorded pan, tilt and optical configuration must remain available for reconstruction of viewing angles. Without accurate pointing information, the lines of sight used in triangulation cannot be determined reliably.

When triangulation evidence is strongest
The most useful UFODAP triangulation cases share several characteristics:
- Two or more stations observed the event simultaneously.
- Station locations are documented.
- Camera clocks are synchronized. [ui.adsabs.harvard.edu]ui.adsabs.harvard.eduof aerial objects using a multi-camera…by A Babinovich · 2025 — By applying triangulation algorithms to synchronized observations from…
- The target remains visible long enough to generate a stable track.
- Viewing angles differ enough to create measurable parallax.
- Environmental conditions allow clear line-of-sight observations.
When these conditions are met, the resulting dataset can move beyond simple detection. Instead of asking only whether an object was recorded, investigators can estimate where it was, how high it was, how fast it moved and whether its apparent behaviour changes once true distance is known. That transition—from angular observations to three-dimensional measurements—is the point at which UFODAP data becomes genuinely capable of supporting triangulation rather than merely documenting an unexplained sighting. [UFODAP+2ADS]ufodap.comDap Camera, Science and TechnologyIf two DAUs are OTDAUs and their cameras lock onto a common object, then MC can triangulate the target…
Amazon book picks
Further Reading
Books and field guides related to When does a camera network measure distance?. Use these as the next step if you want deeper reading beyond the article.
Multiple View Geometry in Computer Vision
Directly explains how multiple camera viewpoints are combined to estimate position and distance.
Computer Vision
First published 2010. Subjects: Computer algorithms, Bildverarbeitung, Computer vision, Image processing, Maschinelles Sehen.
Digital Photogrammetry
First published 2002. Subjects: Photogrammetry, Image processing, Aerial photogrammetry, Digital techniques, Regional planning.
eBay marketplace picks
Marketplace Samples
Example marketplace items related to this page. Use the search link to explore similar finds on eBay.

Endnotes
-
Source: ufodap.com
Link: https://ufodap.com/technologySource snippet
Dap Camera, Science and TechnologyIf two DAUs are OTDAUs and their cameras lock onto a common object, then MC can triangulate the target...
-
Source: ufodap.myshopify.com
Link: https://ufodap.myshopify.com/collections/how-to-configure-a-ufodap-system -
Source: researchgate.net
Link: https://www.researchgate.net/publication/266748010_A_Unified_Approach_for_Multi-Object_Triangulation_Tracking_and_Camera_CalibrationSource snippet
A Unified Approach for Multi-Object Triangulation, Tracking...Object triangulation, 3-D object tracking, feature corresponde...
-
Source: pmc.ncbi.nlm.nih.gov
Link: https://pmc.ncbi.nlm.nih.gov/articles/PMC3545550/Source snippet
Long Baseline Stereovision for Automatic Detection and...by R Danescu · 2012 · Cited by 25 — This paper presents a generic, low cost...
-
Source: ui.adsabs.harvard.edu
Link: https://ui.adsabs.harvard.edu/abs/2025SPIE13720E..1NB/abstractSource snippet
of aerial objects using a multi-camera...by A Babinovich · 2025 — By applying triangulation algorithms to synchronized observations from...
-
Source: arxiv.org
Title: arXiv On the Two-View Geometry of Unsynchronized Cameras
Link: https://arxiv.org/abs/1704.06843 -
Source: ufodap.com
Link: https://ufodap.com/faqSource snippet
Science and Technology, Scientific Ufology, Ufodap FaqThe UFO Data Acquisition System is the collection of UAP tracking, recording and an...
-
Source: ufodap.com
Title: UFODA P
Link: https://ufodap.com/Source snippet
Science and Technology, Ufo, UapUFODAP offers a range of cutting-edge hardware components, including high-resolution cameras, th...
-
Source: arxiv.org
Link: https://arxiv.org/html/2312.00558v3Source snippet
Initial Results From the First Field Expedition of UAPx to...16 Oct 2024 — This paper reviews both the hardware and software techniques...
-
Source: youtube.com
Title: The UFO Data Acquisition Project UFODAP | Ronald Olch
Link: http://www.youtube.com/watch?v=6bDGoVNyvh8Source snippet
UFODAP Presentation V2 2...
-
Source: youtube.com
Title: UFODAP Presentation V2 2
Link: http://www.youtube.com/watch?v=06osHBotcxkSource snippet
UFO/UAP Protocols and Analysis with Ronald Olch (UFO Data Acquisition Project) | 2021 Interview...
-
Source: youtube.com
Link: http://www.youtube.com/watch?v=vJIt0vZyEKQSource snippet
UFODAP Engineer Ron Olch Explains the Gear...
-
Source: youtube.com
Title: UFODAP Engineer Ron Olch Explains the Gear
Link: http://www.youtube.com/watch?v=P0789_mAsRISource snippet
POJECT HORIZON | UFO Triangulation & Data Collection | Preview Robert Earl White / ORDER OF LIGHT · 129 views...
-
Source: mrcal.secretsauce.net
Title: Mrcal Triangulation methods and uncertainty
Link: https://mrcal.secretsauce.net/triangulation.htmlSource snippet
Triangulation methods and uncertainty - mrcalEach triangulation operation takes as input Two camera models. Intrinsics (lens behavio...
-
Source: worldscientific.com
Link: https://www.worldscientific.com/doi/10.1142/S2251171723400020?srsltid=AfmBOopq7DknqBzcZzv398QceiancXwyFhYNi-tZw0E40_Qu3c1EXHqlSource snippet
World ScientificA Hardware and Software Platform for Aerial Object...by M Szenher · 2023 · Cited by 13 — We will use the [Network Time]({{ 'network-time/' | relative_url }}) Pr...
-
Source: ufodap.myshopify.com
Title: Cameras for UFO/UAP tracking and data collection
Link: https://ufodap.myshopify.com/collections/camerasSource snippet
Making the initial detection using a wide-angle fixed camera and handing off continuous tracking to the PTZ camera can make best us...
-
Source: ufodap.myshopify.com
Link: https://ufodap.myshopify.com/Source snippet
UFODAP ShopEnables simultaneous tracking and recording of data from multiple cameras and other instruments. See the PTDAU section for mor...
-
Source: reddit.com
Link: https://www.reddit.com/r/skinwalkerranch/comments/1dswo82/ufodap_system_looks_like_its_based_on_raspberrypi/Source snippet
UFODAP system looks like it's based on RaspberryPiUFODAP system looks like it's based on RaspberryPi, I'm trying to put something similar...
Additional References
-
Source: medium.com
Link: https://medium.com/%40jdxm21/bob-the-universal-object-tracker-82082916b016Source snippet
BOB: The Universal Object Tracker | by David Moorean [open source]({{ 'open-source/' | relative_url }}) software solution to detecting, tracking and recording objects in the sk...
-
Source: reddit.com
Link: https://www.reddit.com/r/UFOs/comments/1675osz/ufodab_finally_complete/Source snippet
UFODAB finally complete: r/UFOsThe software records any events that take place... UAP Tracker Live Stream testing UFODAP OTDAU software...
-
Source: handprint.com
Link: https://www.handprint.com/UFO/UFODAP_Presentation.pdfSource snippet
y and history of data cannot usually be evaluated...
-
Source: youtube.com
Link: https://www.youtube.com/watch?v=Ap6qft93cCMSource snippet
, from simple points to full camera motion...
-
Source: youtube.com
Title: POJECT HORIZON | UFO Triangulation & Data Collection | Preview
Link: http://www.youtube.com/watch?v=7IV-Ui72NVUSource snippet
The UFO Data Acquisition Project UFODAP | Ronald Olch...
-
Source: diva-portal.org
Link: https://www.diva-portal.org/smash/get/diva2%3A1576987/FULLTEXT01.pdfSource snippet
Positioning and tracking using image recognition and...by V Boström · 2021 — While triangulation calculates a position from angles measu...
-
Source: youtube.com
Link: https://www.youtube.com/watch?v=dtkXvNXcWRYSource snippet
Data-driven Feature Tracking for Event Cameras (CVPR 2023...We introduced the first data-driven feature tracker for event cameras which...
-
Source: researchportal.hw.ac.uk
Link: https://researchportal.hw.ac.uk/files/10641510/07398163.pdfSource snippet
This paper addresses these prob- lems within a unified Bayesian framework for joint multi...
-
Source: Wikipedia
Title: Pseudo-range multilateration
Link: https://en.wikipedia.org/wiki/Pseudo-range_multilateration -
Source: geodesy.noaa.gov
Title: NOAA PP 0007
Link: https://geodesy.noaa.gov/library/pdfs/NOAA_PP_0007.pdfSource snippet
In order to obtain an instant of...
Topic Tree